

Self-stability augmentation control method and device of aerial operation robot, and terminal, system and readable storage medium
A working robot and self-increasing technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of precise control effects, unfavorable aerial operations, disturbances deviating from the original position, etc., and achieve the effect of precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
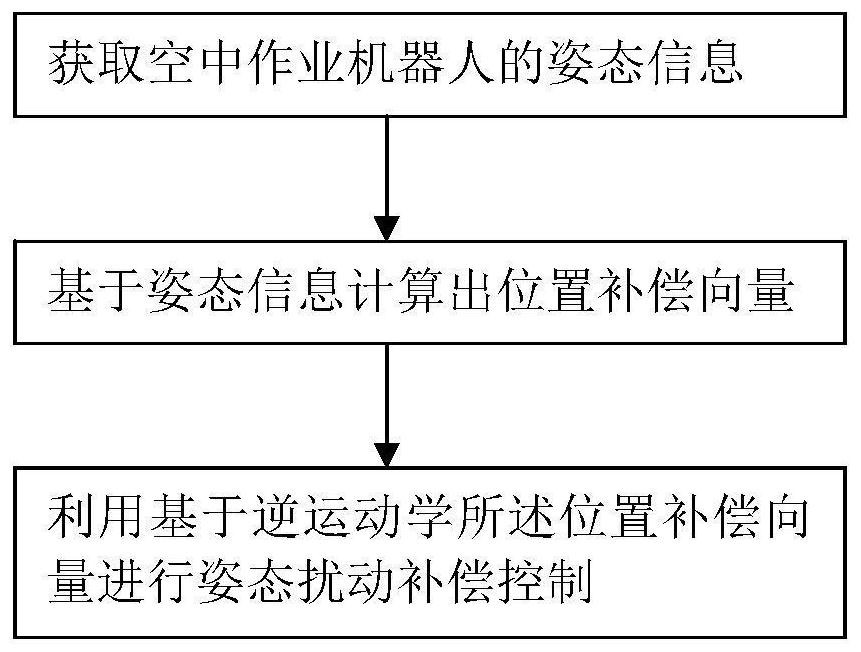
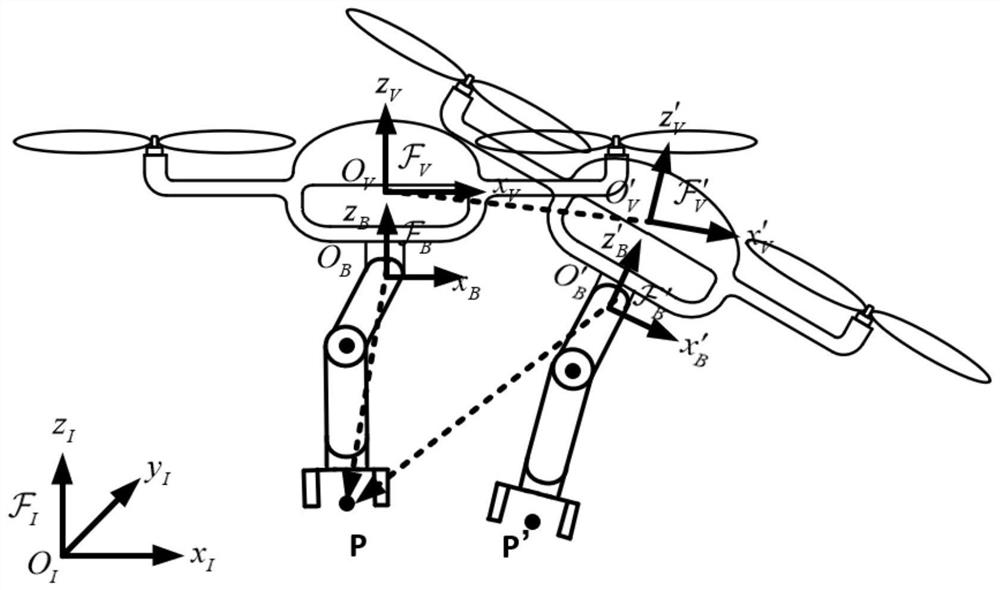
[0029] The invention provides a self-stabilizing control method for an aerial work robot, which is used to solve the problem of the terminal disturbance of the operating mechanism caused when the flying platform changes its own flying attitude. The present invention solves the position compensation vector by studying the vector relationship satisfied during the attitude change process of the flying platform, and then uses inverse kinematics to obtain the joint angle vector required to achieve the target pose, and then controls the relevant joints to achieve the self-stabilizing effect. The present invention will be described below in conjunction with the accompanying drawings. The described embodiments are some, but not all, embodiments of the invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0030] In or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More