Quadruped robot motion control method and system based on diagonal trotting gait
A technology of robot movement and control methods, which is applied in the direction of control/regulation system, attitude control, non-electric variable control, etc. It can solve the problems of robot overturning, attitude control real-time, limited precision and adaptability, difficulty in ensuring robot stability, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments. For the step numbers in the following embodiments, it is only set for the convenience of illustration and description, and the order between the steps is not limited in any way. The execution order of each step in the embodiments can be adapted according to the understanding of those skilled in the art sexual adjustment.
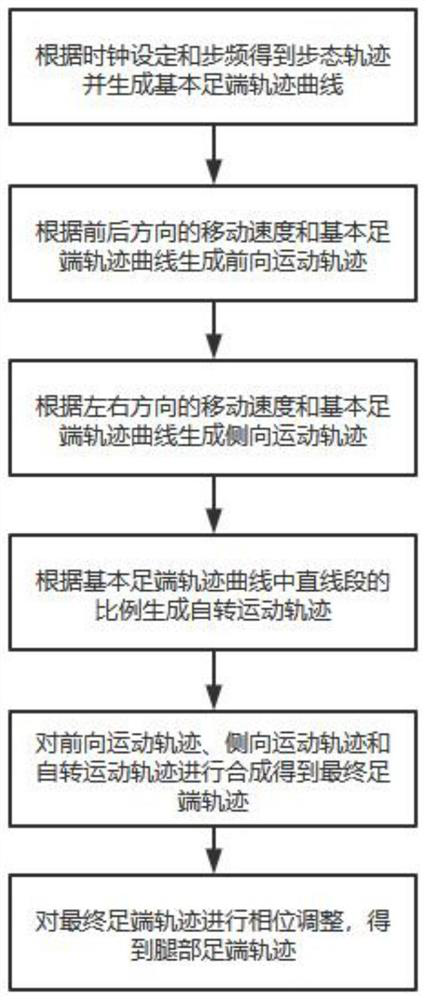
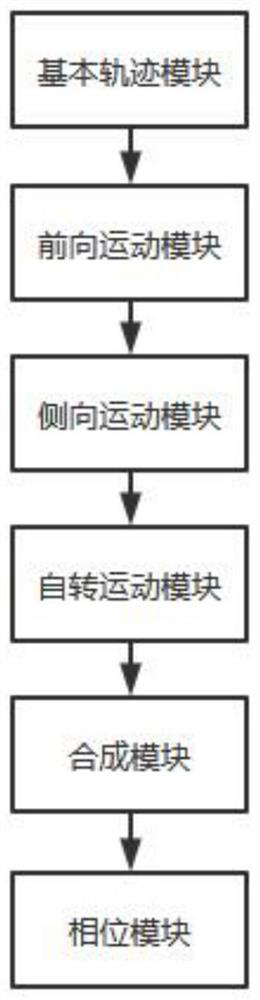
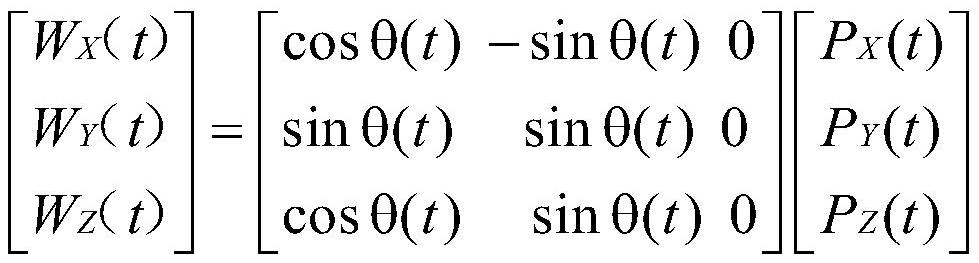
[0037] The invention proposes a quadruped robot motion control method and system based on diagonal trotting posture, which has the following advantages, enabling the robot to maintain good flexibility and stability; enabling the robot's moving speed to better follow the expected speed , can realize all-round movement control; and by mapping the coordinates of the foot end, the robot realizes automatic adaptation to the slope after sensing the slope with the sensor, and can complete real-time self-adaptation to the slo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More