

Autonomous underwater vehicle course angle control method based on improved firefly PID method
A technology of underwater vehicles and control methods, applied in the direction of attitude control, etc., can solve problems such as difficult to accurately describe the working environment of mathematical models, difficult to obtain control effects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
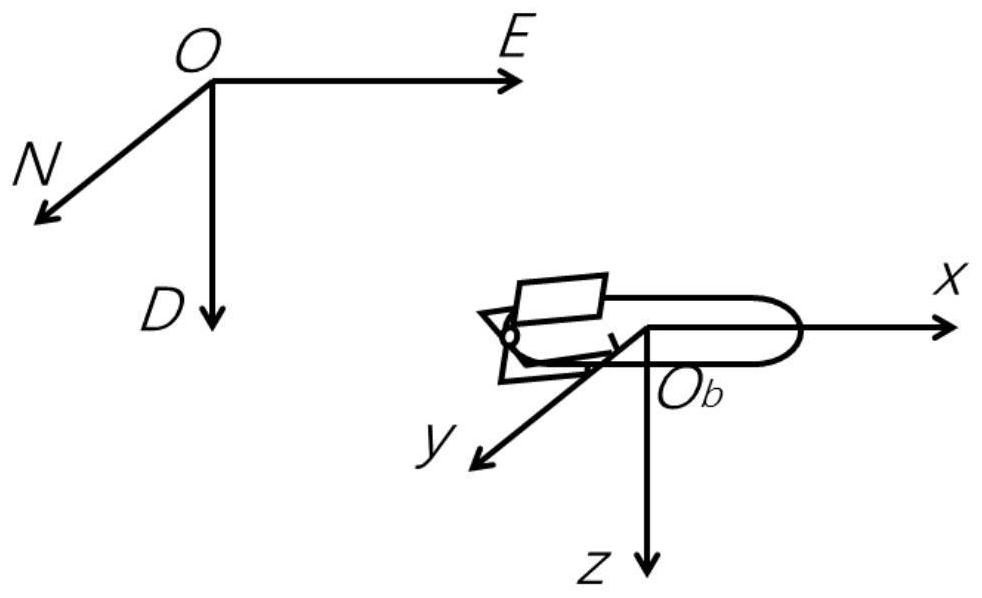
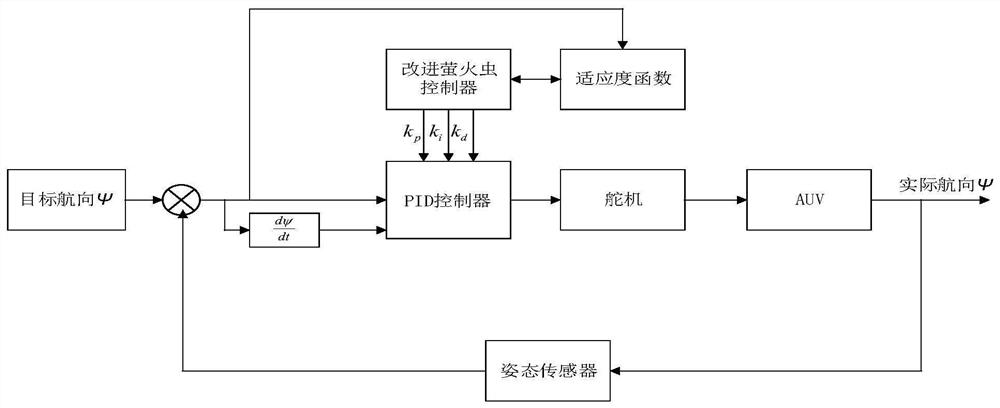
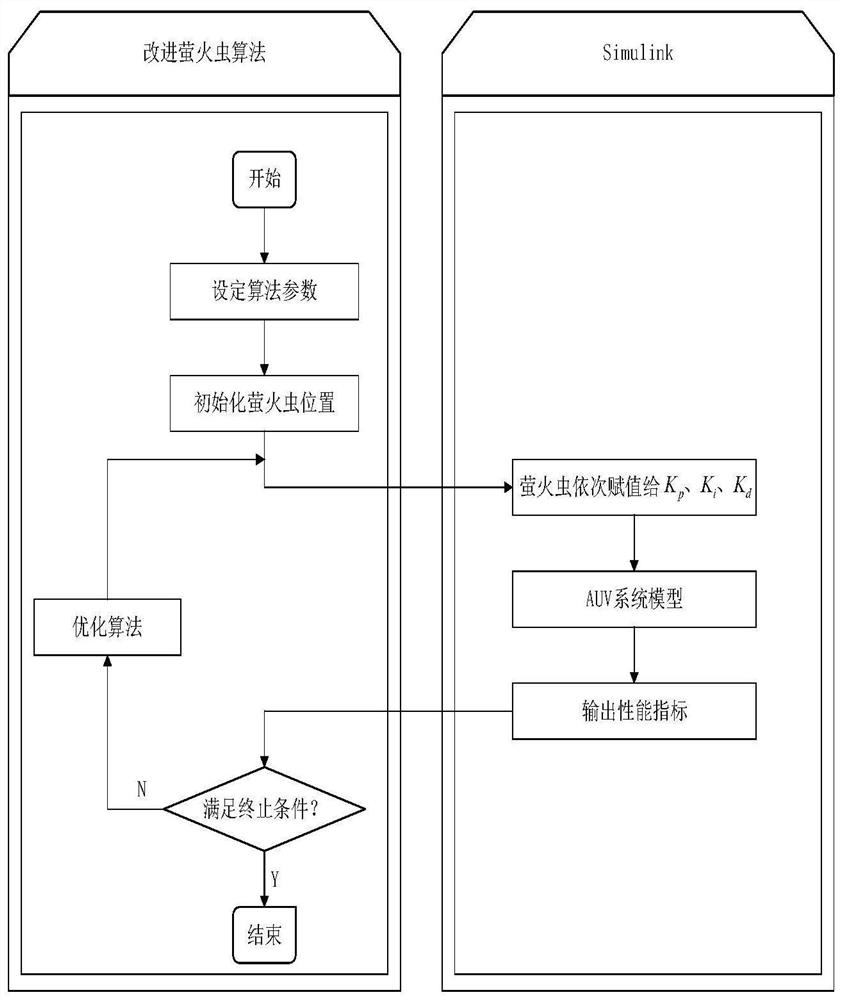
[0041] The present invention mainly aims at the heading angle control problem of the autonomous underwater vehicle, utilizes the improved firefly algorithm, proposes an autonomous underwater vehicle attitude control method based on the improved firefly PID method, by using the PID control parameters as the solution space of the firefly value, the error performance is used as the evaluation function of the improved firefly algorithm, and the adaptive adjustment of the parameters of the PID controller for the heading angle of the autonomous underwater vehicle is realized. The simulation results show that the improved algorithm solves the problem caused by the improper selection of the controller parameters. For the problems of overshoot and long response time, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More