

Integral model prediction control method of omnidirectional mobile robot
A technology of model predictive control and mobile robot, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that traditional model predictive control cannot eliminate steady-state error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0118] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0119] The invention provides a technical solution: an integral model predictive control method for an omnidirectional mobile robot,
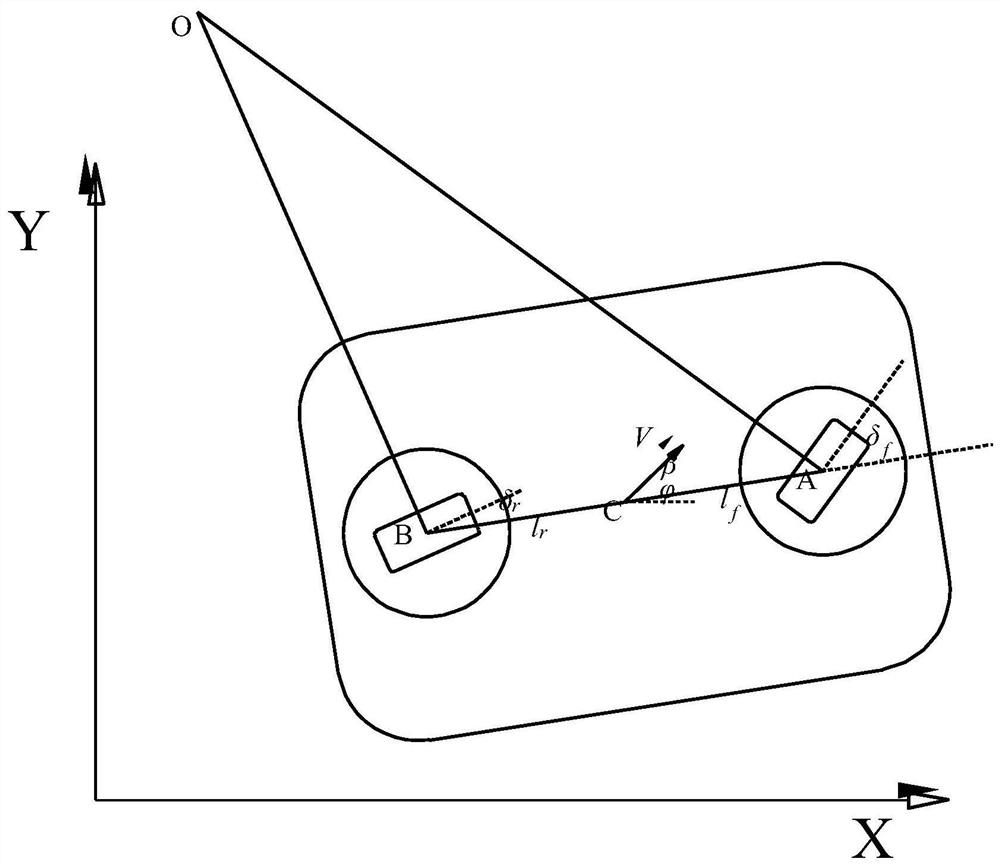
[0120] Step 1: Construct the kinematics model of the omnidirectional mobile robot
[0121] The schematic diagram of an omnidirectional mobile robot is shown in figure 1 As shown, the front and rear wheels of the omnidirectional mobile robot can go straight and turn. The front wheel is represented by A, the rear wheel is repres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More