

UAV-based electric power inspection method, device and electronic equipment
A power inspection and drone technology, applied in the field of drones, can solve the problems of low efficiency of drone line inspection, redundant staffing, and failure to meet the requirements of unmanned inspection of drones. Realize independent inspection, improve efficiency and save manpower
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0060] figure 1 It shows a schematic flow chart of a drone-based power inspection method provided by an embodiment of the present invention.
[0061] The UAV-based power inspection method provided by the embodiment of the present invention can be applied to automatic power inspection, and is executed by corresponding electronic equipment (such as an on-board computer) installed on the UAV.
[0062] Specifically, refer to figure 1 , the power inspection method based on unmanned aerial vehicle comprises the following steps:
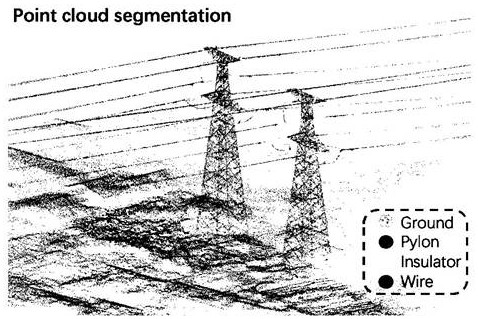
[0063] Step S110, obtaining a three-dimensional point cloud of the target power line region;
[0064] Among them, the three-dimensional point cloud is generated based on the lidar data collected by the lidar; the three-dimensional point cloud includes the wire point cloud, the tower point cloud, the insulator power supply, and can also include the ground point cloud; the three-dimensional point cloud includes at least one power tower ( referred to as tow...
no. 2 example
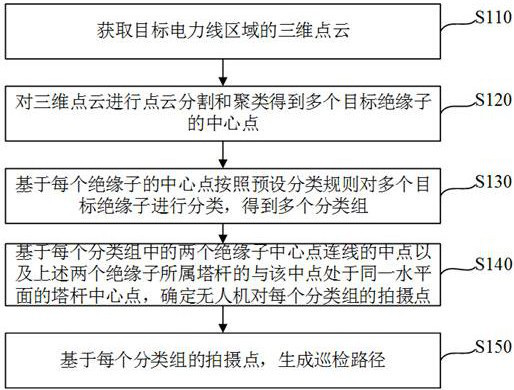
[0119] Figure 8 It shows a schematic flowchart of another drone-based power inspection method provided by an embodiment of the present invention.
[0120] refer to Figure 8 , the UAV-based power inspection method includes:
[0121] Step S810, acquiring a three-dimensional point cloud of the target power line region;
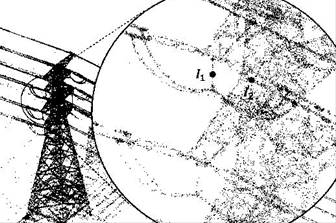
[0122] Step S820, performing point cloud segmentation and clustering on the three-dimensional point cloud to obtain the center points of multiple target insulators;
[0123] Step S830, based on the center point of each insulator, classify multiple target insulators according to preset classification rules to obtain multiple classification groups; wherein each classification group includes two insulators belonging to the same side of the same layer of the same tower;
[0124] Step S840, based on the midpoint of the line connecting the center points of the two insulators in each classification group and the center point of the tower pole to which the above two...
no. 3 example
[0146] Figure 11 A schematic diagram of an unmanned aerial vehicle-based power inspection device provided by an embodiment of the present invention is shown.
[0147] refer to Figure 11 , the UAV-based power inspection device includes: an acquisition module 901, a segmentation module 902, a classification module 903, a determination module 904, and a generation module 905;
[0148] Wherein, the obtaining module 901 is used to obtain the three-dimensional point cloud of the target power line region;
[0149]The segmentation module 902 is used to perform point cloud segmentation and clustering on the 3D point cloud to obtain the center points of multiple target insulators;
[0150] The classification module 903 is used to classify a plurality of target insulators according to preset classification rules based on the central point of each insulator to obtain a plurality of classification groups; wherein each classification group includes two insulators;
[0151] The determi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More