

Iterative learning control method for rehabilitation mechanical device based on extended state observer
It is an iterative learning control and mechanical device technology. It is applied in the control of using feedback, gymnastics equipment, and adaptive control. It can solve the problems of high displacement control accuracy, user discomfort, and inability to guarantee the recovery effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
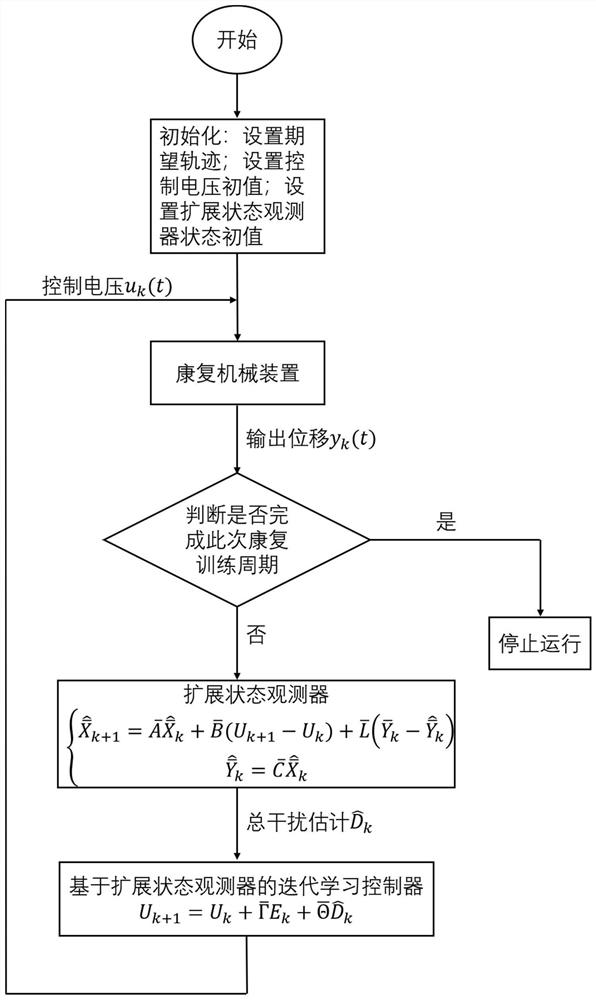
[0069] Step 1: Mathematically abstract the rehabilitation mechanical device and establish a linear model of the rehabilitation mechanical device.
[0070] The rehabilitation mechanical device is mathematically abstracted, and the linearized model of the rehabilitation mechanical device is established as follows:
[0071]
[0072] Among them, t∈{0,…,N} represents the sampling time, N is a positive integer, Indicates the number of iterations to run, x k (t) represents the internal state of the rehabilitation mechanical device at time t when k iterations are running, x k (t+1) represents the internal state of the rehabilitation mechanism at time t+1 when k iterations are running, u k (t) represents the control voltage data at time t when the rehabilitation mechanical device runs for k iterations, y k (t) represents the output displacement data at time t when the rehabilitation mechanical device runs for k iterations, w k (t) represents the internal disturbance at time t w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More