

Iterative Learning Control Method and System for Rehabilitation Mechanical Device Based on Disturbance Observer
A technology of iterative learning control and interference observer, applied in the field of iterative learning control, can solve the problems of large interference effect of control effect, unguaranteed rehabilitation effect, high displacement control accuracy, etc., to achieve effective interference handling, flexible setting, and accelerated recovery effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and examples. It should be understood that the following examples are intended to facilitate the understanding of the present invention, and have no limiting effect on it.
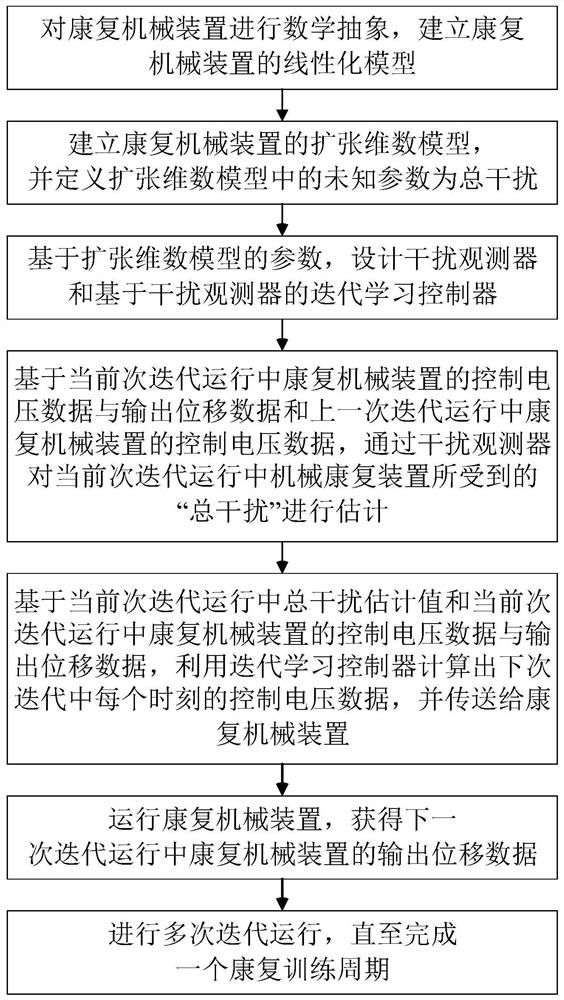
[0046] Such as figure 1As shown, the iterative learning control method for rehabilitation mechanical devices based on disturbance observers in this embodiment includes the following steps:
[0047] Step 1: Mathematically abstract the rehabilitation mechanical device and establish a linear model of the rehabilitation mechanical device;
[0048] Mathematically abstract the rehabilitation mechanical device and establish a general linear model, which can be specifically described as:
[0049]
[0050] Among them, t∈{0,…,N} represents the sampling moment, N is the sampling period, Indicates the number of iterations to run; x k (t) represents the internal state of the rehabilitation mechanism during ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More