

Map path planning method based on combination of improved Astar algorithm and grey wolf algorithm
A path planning and map technology, applied in calculation, calculation model, road network navigator, etc., can solve the problems that the path does not have connectivity and is not suitable for driverless cars
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
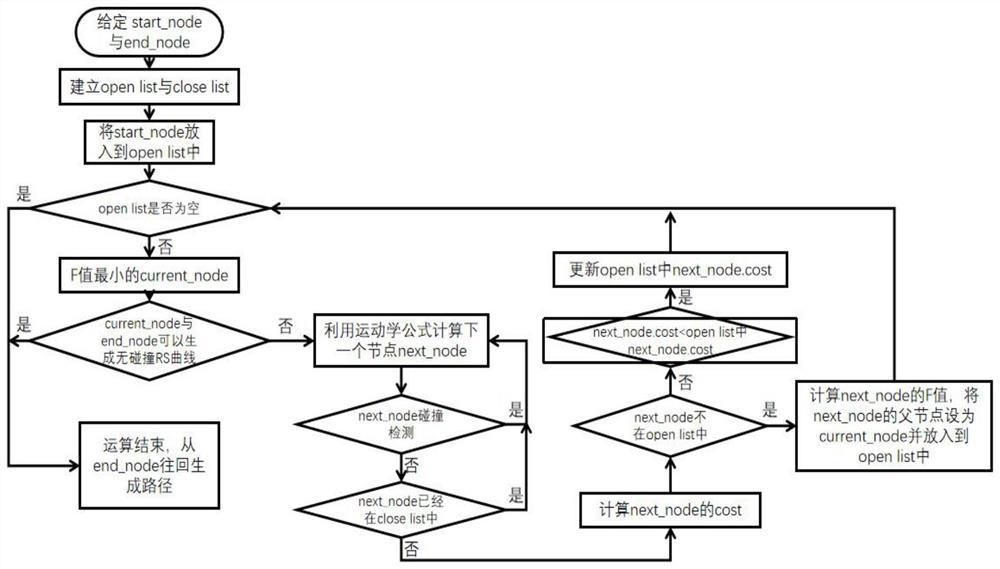
[0066] Such as figure 1 The map path planning method based on the combination of the improved Astar and gray wolf algorithms shown in the figure specifically includes the following steps:
[0067] Step 1, build high-precision map based on data collection equipment, described data collection equipment includes the data collection vehicle of Ladybag3.5 panorama camera and GPS combined inertial navigation, and concrete construction method is:
[0068] (1) Use the collection car to stop every 10 meters to collect a picture and the GPS data of the vehicle corresponding to the picture at the moment;
[0069] (2) Change the perspective of the picture and stitch it into a whole map using PS, etc.;
[0070] (3) Since the absolute coordinates of the vehicle are known and the position of each marker relative to the vehicle is known, the absolute coordinates of the markers are known, and arcgis is used to mark the entire map;
[0071] (4) Save the map data and use arcgis to output the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More