

Dual Arm Surgical Robot
A surgical robot and double-arm technology, applied in surgical manipulators, surgical robots, surgery, etc., can solve problems such as greatly affecting the effect of surgery, errors in the positioning system, and re-operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
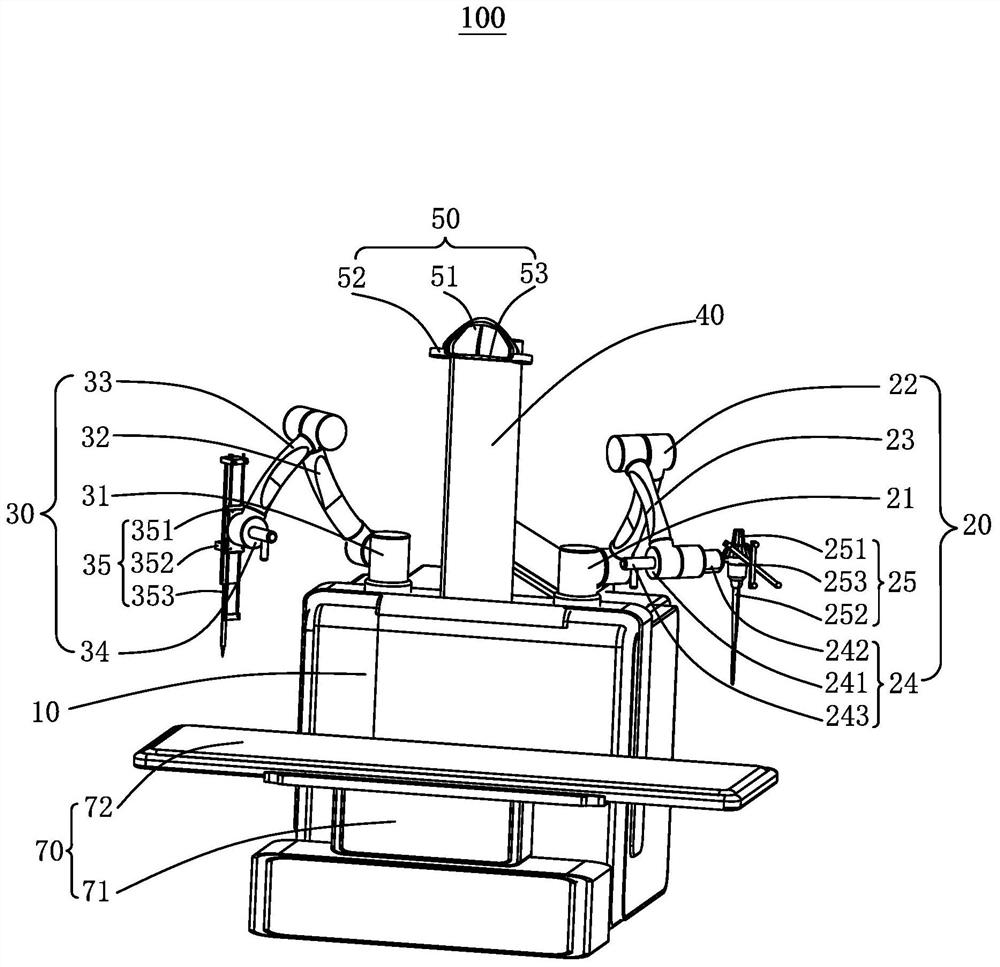
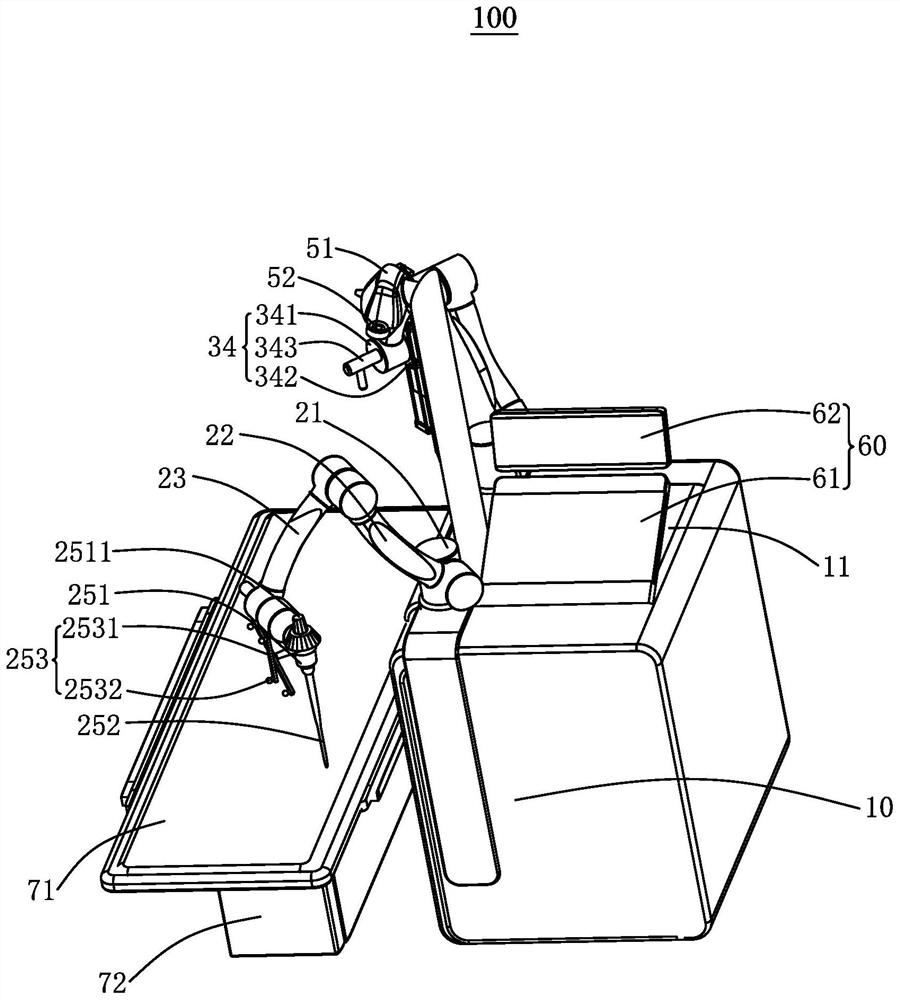
[0020] like Figure 1 to Figure 2 As shown, a dual-arm surgical robot 100 of the present invention includes a workbench 10, a support 40 disposed on the workbench 10, a navigation positioning module 50 fixed on the support 40, and is movably disposed on the workbench 10. The first robot arm 20 and the second robot arm 30 , the display assembly 60 fixed on the worktable 10 and the operating table 70 arranged adjacent to the worktable 10 .
[0021] Wherein, the navigation positioning module 50 is used to locate the positions of the first robotic arm 20 and the second robotic arm 30 and guide the first robotic arm 20 and the second robotic arm 30 to perform surgery according to the surgical path set by the system. The first robotic arm 20 is used to locate the surgical site for surgery, the second robotic arm 30 is used to cooperate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More