

Method for eliminating dynamic obstacle artifacts in laser point cloud map
A laser point cloud and dynamic technology, applied in image analysis, graphics and image conversion, image data processing, etc., can solve the problems that dynamic obstacles cannot obtain good detection results, geometric features and motion features are not obvious, and achieve fast segmentation results , save computing time, and have adaptive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
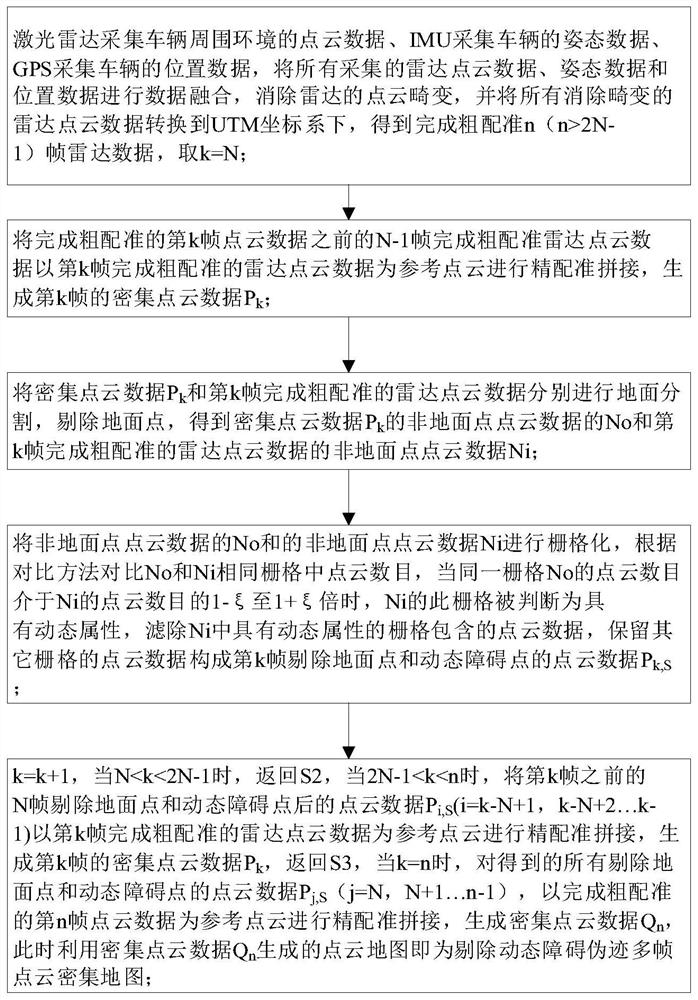
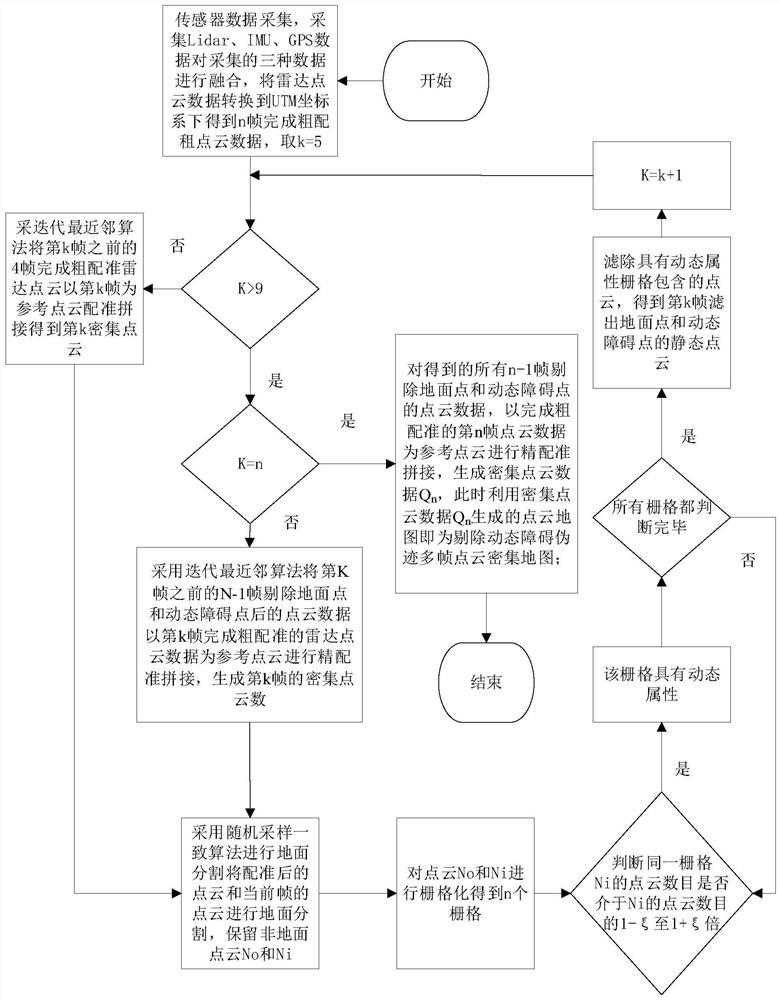
[0052] Embodiment 1, a method for removing dynamic obstacle artifacts in a laser point cloud map includes the following specific processes:
[0053] S1: The lidar collects point cloud data of the surrounding environment of the vehicle, the IMU collects the attitude data of the vehicle, and the GPS collects the position data of the vehicle, and performs data fusion of all collected radar point cloud data, attitude data and position data to eliminate the radar point cloud Distortion, and convert all the radar point cloud data that eliminates distortion to the UTM coordinate system, and obtain n frames of radar data that have completed rough registration, and take k=5;
[0054] S2: The coarse registration radar point cloud data of the 4 frames before the kth frame of coarse registration is completed, and the radar point cloud data of the kth frame of rough registration is used as the reference point cloud for fine registration stitching to generate The dense point cloud data P of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More