

Unmanned aerial vehicle flight control method based on imitation learning and reinforcement learning algorithms
A flight control and reinforcement learning technology, applied in attitude control, non-electric variable control, control/regulation systems, etc., can solve the problems of sparse rewards, large fluctuations, and excessive space for action exploration, achieving high similarity and scalability Strong and suitable for migration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with specific embodiment, further illustrate the present invention, should be understood that these embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various equivalent forms of the present invention All modifications fall within the scope defined by the appended claims of the present application.
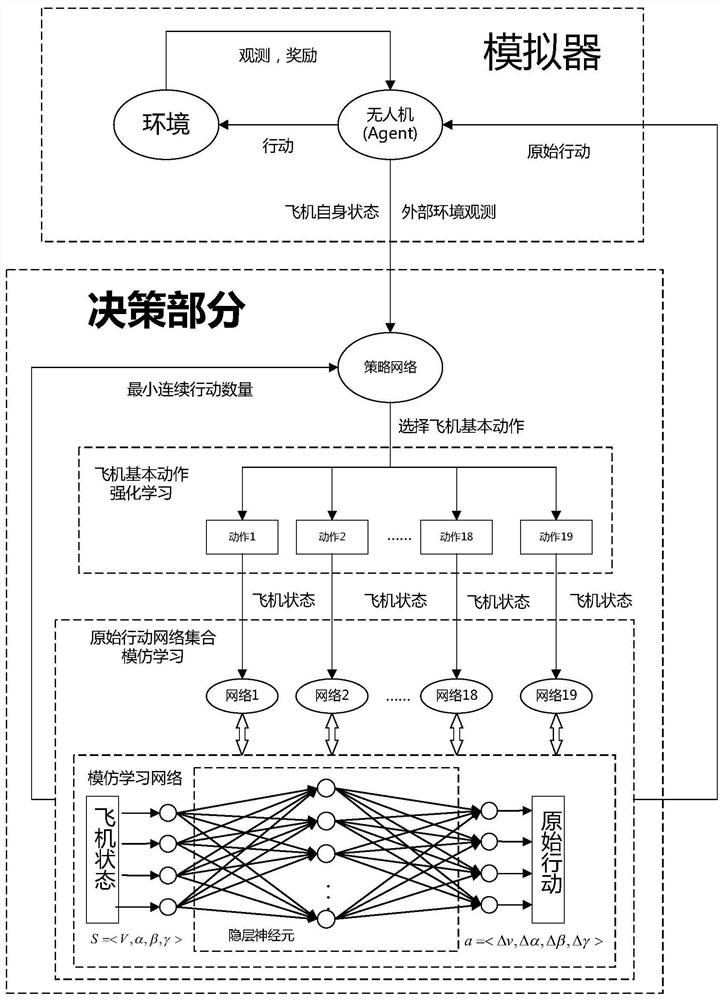
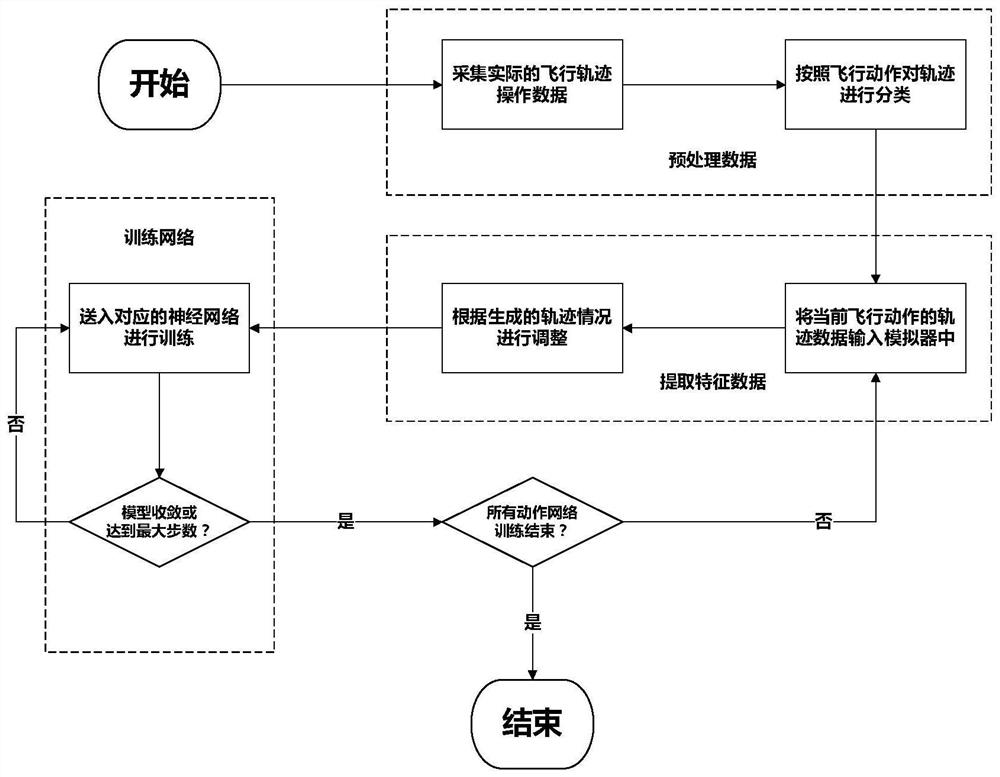
[0031] A UAV flight control method based on imitation learning and reinforcement learning algorithms, which defines different complete flight actions according to actual flight data, and learns the collected flight trajectories through imitation learning to simplify the action space of the original problem Effect. Then use the pDQN algorithm, an improved algorithm of the DQN algorithm, to learn the strategy in the simplified space. Include the following steps:
[0032] step one:
[0033]Firstly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More