

A path planning and decision-making method for an aircraft around multiple no-fly zones
A technology of path planning and decision-making method, applied in the aerospace field, it can solve problems such as unable to reflect the size of the control force, difficult to make path decision plans, unable to provide alternative solutions, etc., to achieve scientific methods, simple methods, and broad application value. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation.
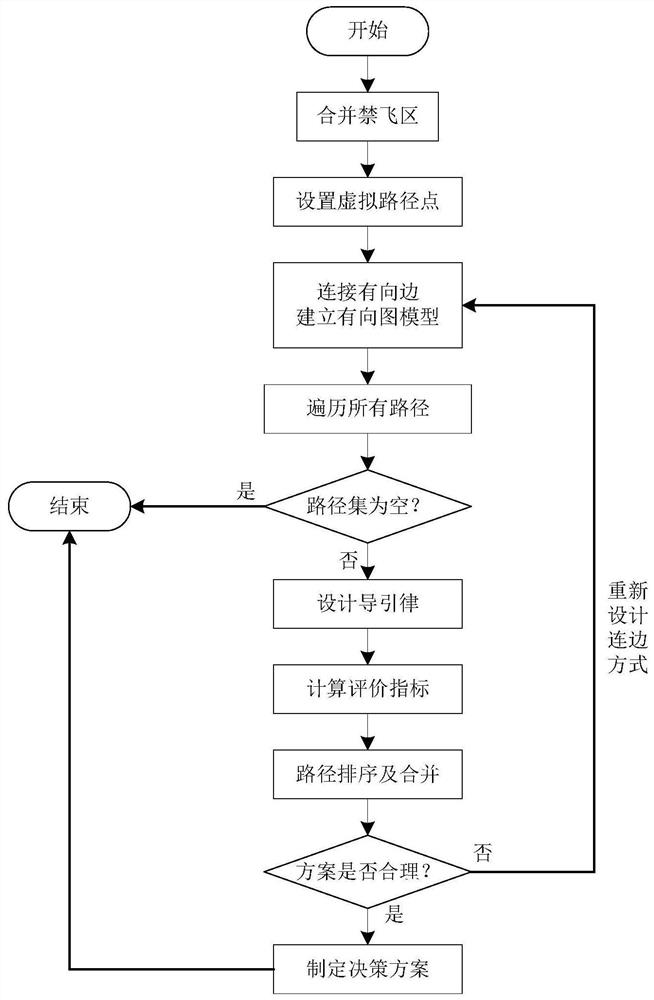
[0038] The present invention is a method for path planning and decision-making of an aircraft around multiple no-fly zones, the flow chart of which is as follows figure 1 As shown, it includes the following steps:
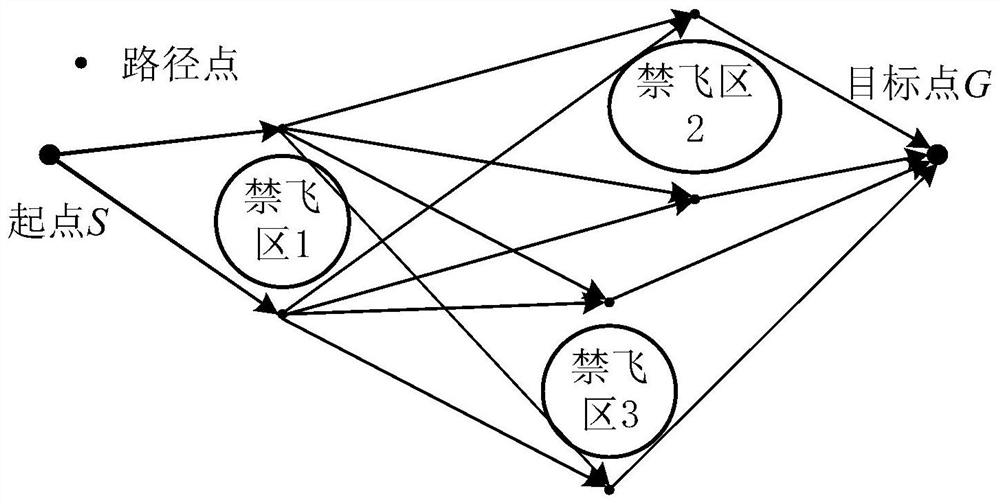
[0039] Step 1. Establish a directed graph model;
[0040] The purpose of this step is to carry out environmental modeling, that is, to abstract the actual physical space into an abstract space that can be handled by the path planning method, that is, first expand the no-fly zone, establish a coordinate system and calibrate the position of the no-fly zone. Here, the method is based on graph theory for modeling.
[0041] Incorporate no-fly zones first. In the actual mission environment of the aircraft, there may be overlapping areas between the no-fly zones, or because the distance between the no-fly zones is too sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More