

V-SLAM pose estimation method based on Kinect camera
A camera and pose technology, applied in the field of computer vision, can solve problems such as low precision, affecting the camera, and low matching efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
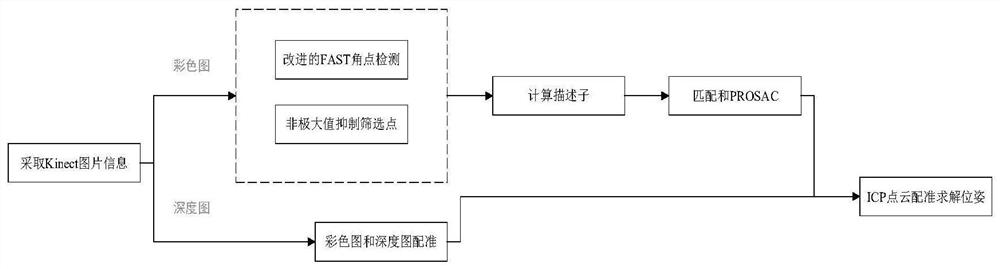
[0054] Such as figure 1It is the flowchart of the example method of the present invention, a kind of V-SLAM pose estimation method based on Kinect camera, mainly comprises as follows:
[0055] Step 1: Collect Kinect camera image information, that is, obtain color information and depth information. In order to cooperate with ICP to solve the pose, it is necessary to convert the two-dimensional pixel points into three-dimensional space points to generate a three-dimensional point cloud. Use the internal parameter matrix of the Kinect camera for calculation, and convert the two-dimensional pixel points into three-dimensional...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More