

Supercavitating vehicle H-infinity controller controller design method
A technology of supercavitating vehicle and design method, applied in adaptive control, general control system, control/regulation system, etc., can solve tail shock, loss of buoyancy, modeling and control design difficulties of supercavitation vehicle, etc. problems to ensure stable operation and meet performance indicators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
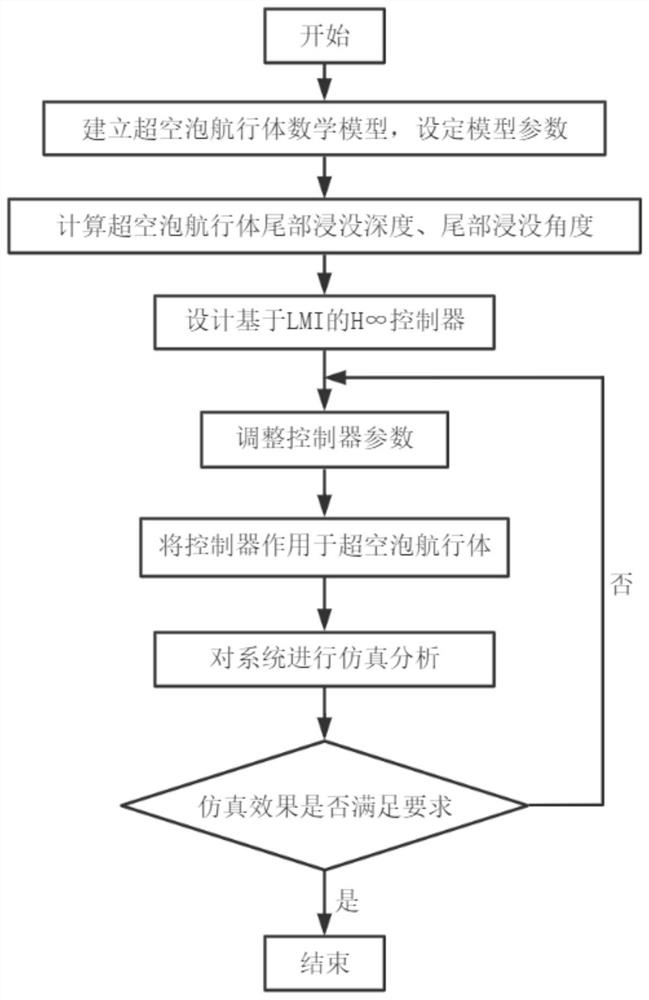
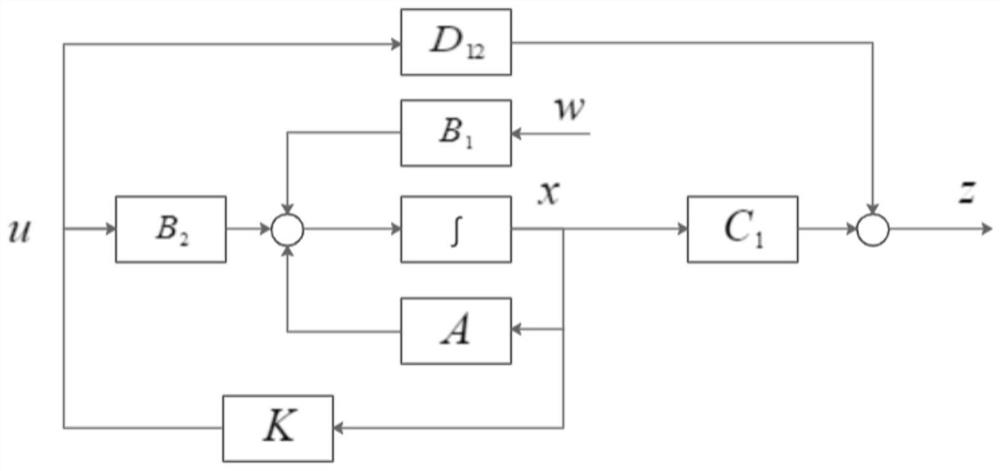
[0032] combine figure 1 and figure 2 , the present invention is completed by the following parts:
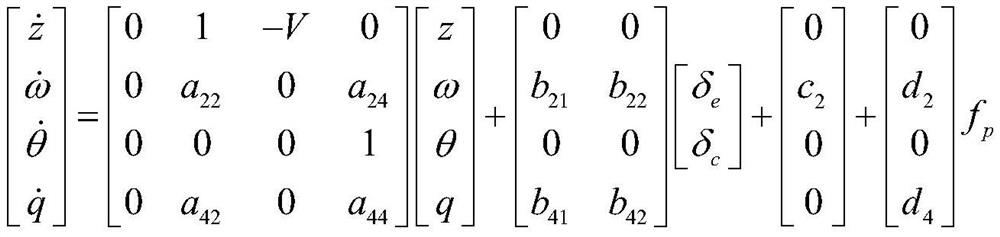
[0033] 1. Establish the nonlinear dynamics model of the underwater supercavitation vehicle and set the model parameters. The nonlinear dynamic model of underwater supercavitating vehicle is:
[0034]
[0035] where x is the state variable [z ω θ q] T , z represents the vertical position of the center of gravity of the vehicle, ω represents the vertical velocity of the vehicle, θ represents the pitch angle of the vehicle, q represents the pitch rate of the vehicle, and u is the control input [δ e δ c ] T ,δ e Indicates the deflection angle of the stern rudder of the vehicle, δ c Indicates the deflection angle of the cavitator of the vehicle, f p represents the gliding force of the vehicle, and A, B, C, D are parameter matrices res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More