

Intelligent vehicle-oriented regional cooperative driving intention scheduling method and system and medium
A driving intention and intelligent vehicle technology, applied in the control/regulation system, vehicle position/route/height control, motor vehicles, etc., to improve driving safety, improve overall traffic efficiency, and avoid the risk of vehicle conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
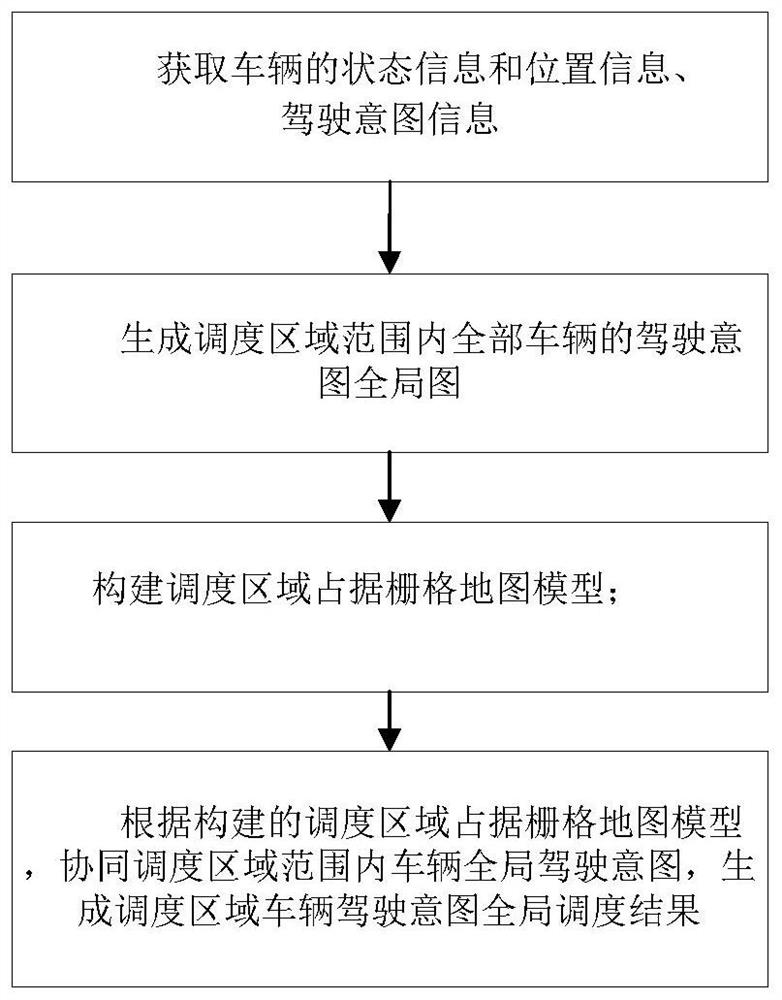
[0066] This embodiment discloses an intelligent vehicle-oriented area cooperative driving intention scheduling method. This method is used in the intelligent driving of the human-vehicle shared driving mode, which can avoid the risk of vehicle conflict and improve driving safety. On the other hand, it will also improve the area The overall traffic efficiency within the range, the specific process of the method is as follows figure 1 shown, including:
[0067] S1. Acquiring state information and location information of the vehicle; at the same time, obtaining driving intention information of the vehicle identified by the state information of the vehicle. In this embodiment, the acquired vehicle state information specifically includes the state of the accelerator pedal of the vehicle, the steering wheel angle, the state of the brake pedal, and the absolute speed of the vehicle.
[0068] Wherein, the process of identifying the driving intention information of the vehicle through...
Embodiment 2
[0092] This embodiment discloses an intelligent vehicle-oriented area cooperative driving intention scheduling device, such as Figure 4 As shown, it includes information acquisition module, driving intention global map generation module, map model construction module and global dispatch result generation module: the functions realized by each module are as follows:
[0093] An information acquisition module, configured to acquire status information and location information of the vehicle, and to acquire the driving intention of the vehicle identified through the status information and location information of the vehicle;
[0094] The driving intention global map generation module is used to generate the driving intention global map of all vehicles in the dispatching area according to the driving intention information, vehicle status information and vehicle position information of the vehicles in the dispatching area;
[0095] A map model building module, used to build a grid ...
Embodiment 3
[0099] This embodiment discloses an intelligent vehicle-oriented regional cooperative driving intention scheduling system. Based on the system of this embodiment, the intelligent vehicle-oriented regional cooperative driving intention scheduling method described in Embodiment 1 can be implemented. Such as Figure 5 As shown in , the regional coordinated driving intention scheduling system for smart vehicles in this embodiment includes a cloud scheduling system 30 , and a vehicle driving intention perception system 10 and a vehicle driving intention control system 20 installed on the vehicle. in:
[0100] The on-vehicle driving intention perception system is connected to the on-vehicle driving intention control system to obtain the state information and location information of the vehicle, and send the obtained vehicle state information and location information to the on-vehicle driving intention control system;
[0101] In this embodiment, the vehicle-mounted driving intentio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More