

Mechanism and method for mobile robot to go upstairs and downstairs based on Mecanum wheel omni-directional steering function
A mobile robot, all-round technology, applied in the direction of motor vehicles, motion deposition, power devices, etc., can solve the problems of excessive leg and foot landing point offset, difficult control, low wheel utilization rate, etc., to reduce the design of steering mechanism , The effect of simple mechanical structure and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The schematic implementation and description of the present invention are used to explain the present invention, but not as a limitation to the present invention.
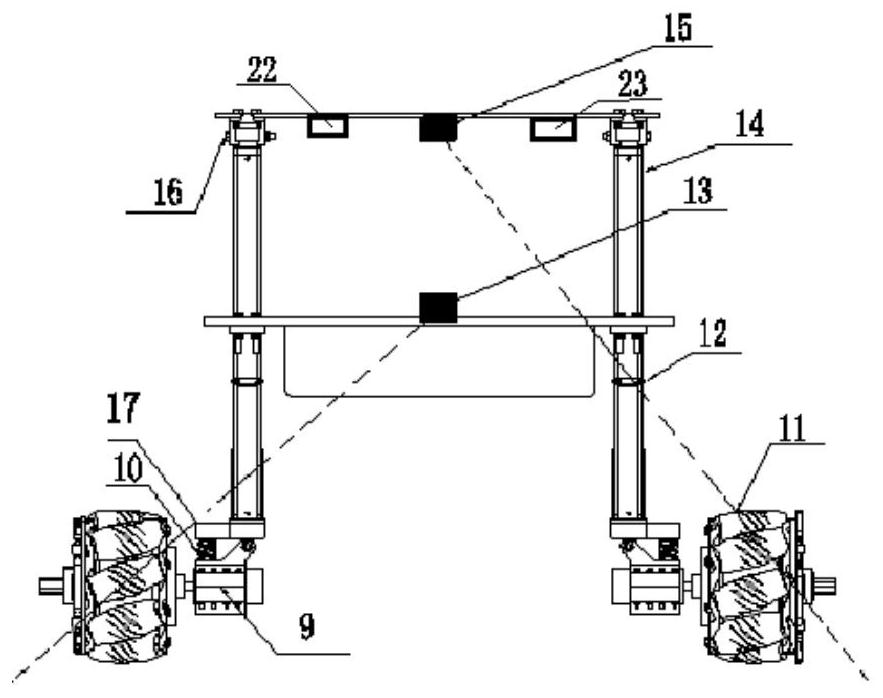
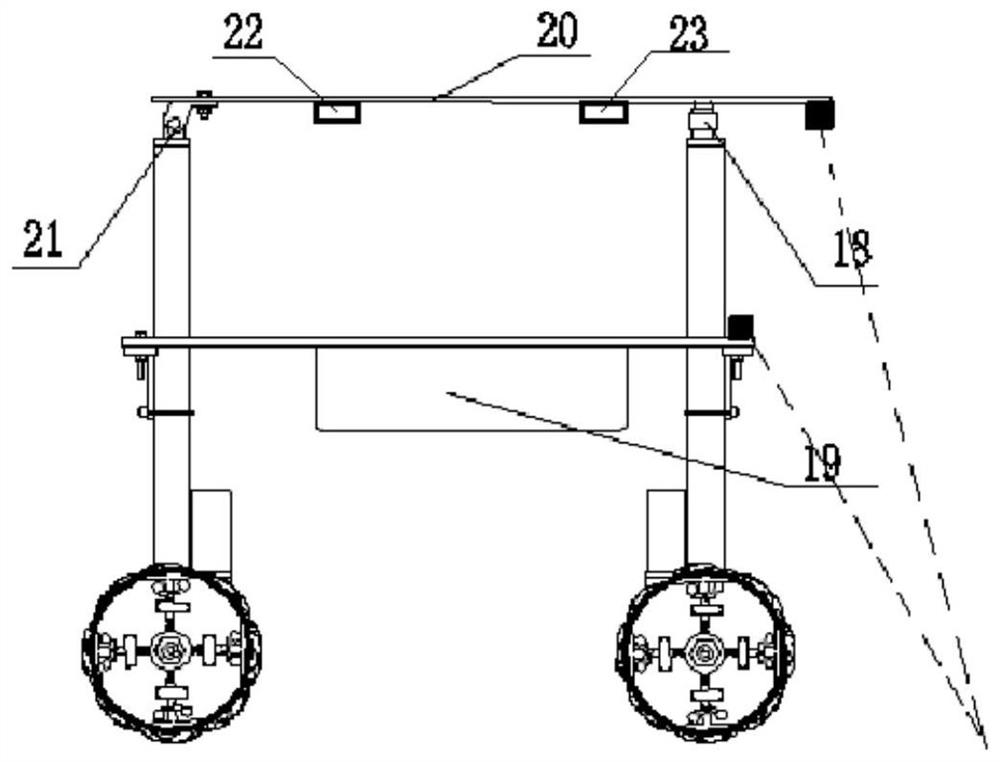
[0038] Such as figure 1 , figure 2 As shown, the mechanism of the mobile robot going upstairs and downstairs based on the omni-directional steering function of the wheat wheel includes at least two pairs of wheat wheels 11, the wheat wheels 11 are connected to the platform support 17 through the wheat wheel motor 9, and the platform support 17 is supported by a pair of platform legs 12 A lower loading platform 20 supports an upper loading platform 20 above it through the electric cylinder 14 .
[0039] In this embodiment, the four electric cylinders 14 that support the loading platform, the two electric cylinders 14 at the front end are connected with the loading platform 20 using...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More