

Target tracking method for tracking ground moving target by unmanned aerial vehicle
A target tracking and moving target technology, which is applied in the field of autonomous tracking and control of unmanned aerial vehicles, can solve the problems of input and output changes, uncertainty of actuator characteristics, uncertainty of operating environment, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
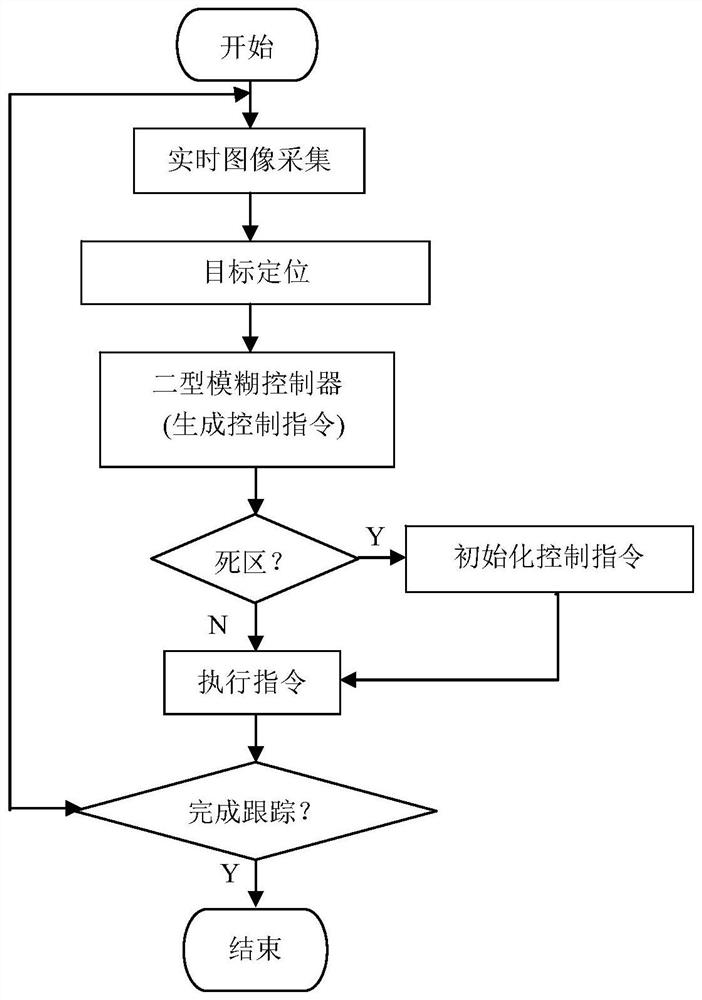
[0044] Such as figure 1 , is a flow chart of a target tracking method for an unmanned aerial vehicle tracking a ground moving target according to the present invention, and the process is specifically:
[0045] (1) Take a video when the UAV is flying, select the target that the UAV needs to track in the frame of the returned video, and extract the HOG and HSV features of the target;
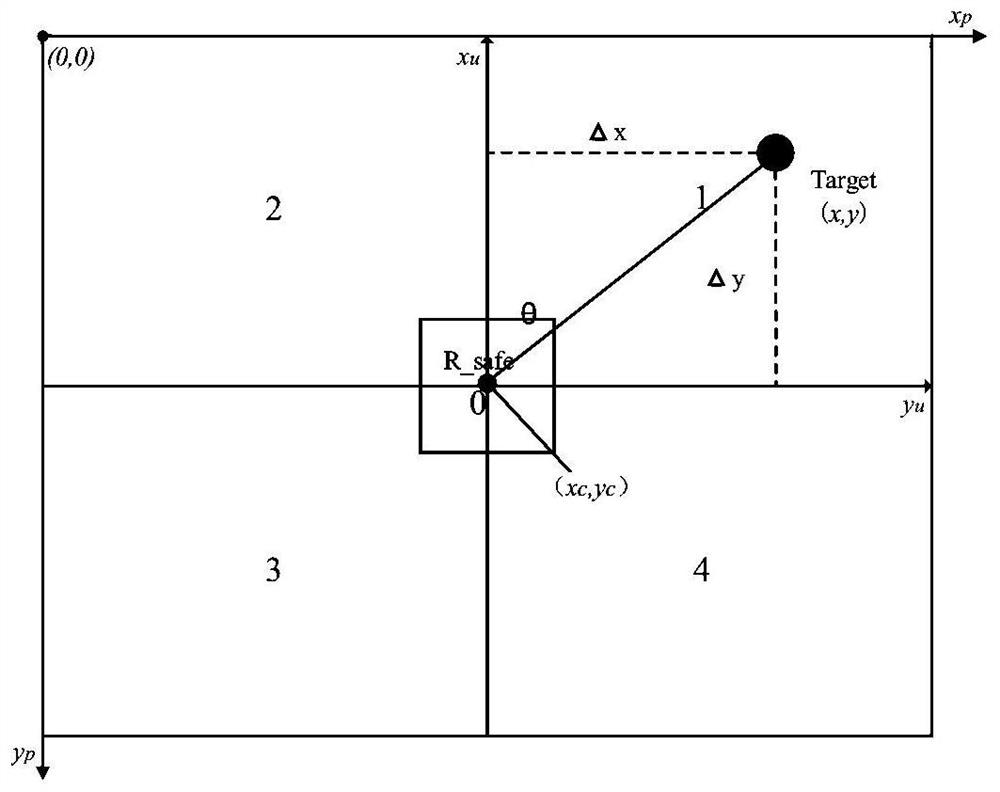
[0046] (2) Through the HOG and HSV features extracted in step 1, locate the center coordinates of the target on the image (x o ,y o ); Calculate the center coordinates (x 0 ,y 0 ) and the position coordinates of the UAV center of view (x c ,y c ) the absolute offset Δx in the horizontal direction and the absolute offset Δy in the vertical direction:
[0047]
[0048] (3) When |Δx|≤w safe / 2, the angle of the UAV does not need to be adjusted;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More