

Geometric parameter and joint zero self-calibration method, device, electronic equipment and medium
A technology of geometric parameters and joint positions, which is applied in the direction of program-controlled manipulators, manufacturing tools, manipulators, etc., can solve the problems of incomplete consideration of calibration parameters and poor versatility of calibration methods, and achieve the effect of improving control effects and positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
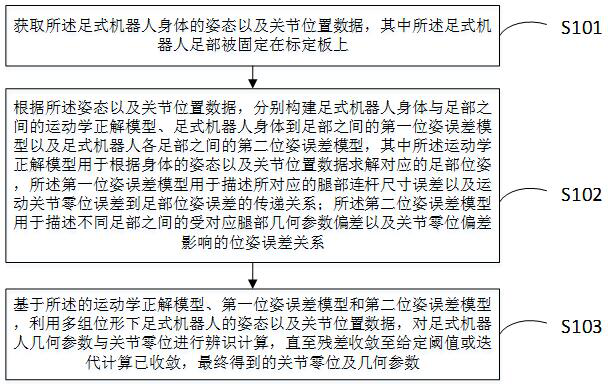
[0020] figure 1 It is a flow chart of a geometric parameter and joint zero self-calibration method according to an exemplary embodiment. figure 1 This embodiment provides a geometric parameter and a zero range self-calibration method for the geometric parameters of the foot robot and the joint zero self-calibration, which includes the following steps:
[0021] Step S101, the posture of the foot-based robot, and the joint position data, wherein the foot-based robot is mounted on the calibration plate 2;
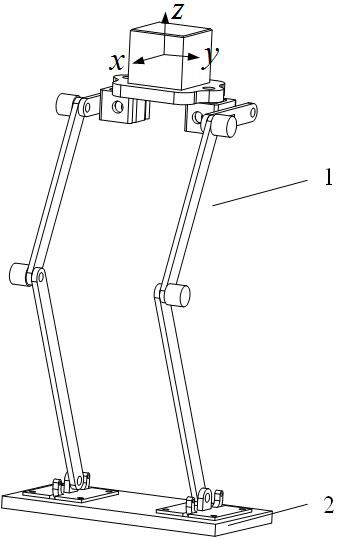
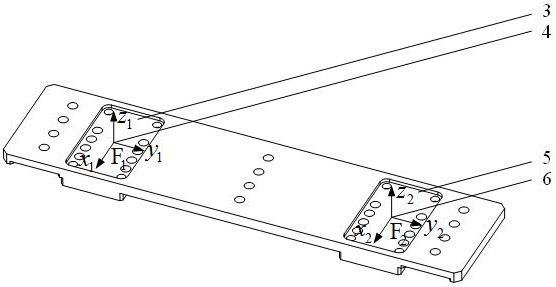
[0022] specifically, figure 2 It is a schematic structural diagram of a double-foot robot according to an exemplary embodiment, image 3 It is a schematic diagram of the calibration board according to an exemplary embodiment. Figure 4 It is an intent for the structure of the double-foot robot according to an exemplary embodiment. The calibration plate is processed with the same positioning portion as the number of footsteps of the foot, for connecting the footer and the posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More