

Model-free Adaptive Auv Control Method Based on Active Disturbance Rejection
A model-free self-adaptive and active disturbance rejection control technology, applied in adaptive control, general control systems, control/regulation systems, etc., can solve problems such as poor anti-interference ability, achieve small calculation, simple implementation, and fast overcoming The effect of sexuality and overshooting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
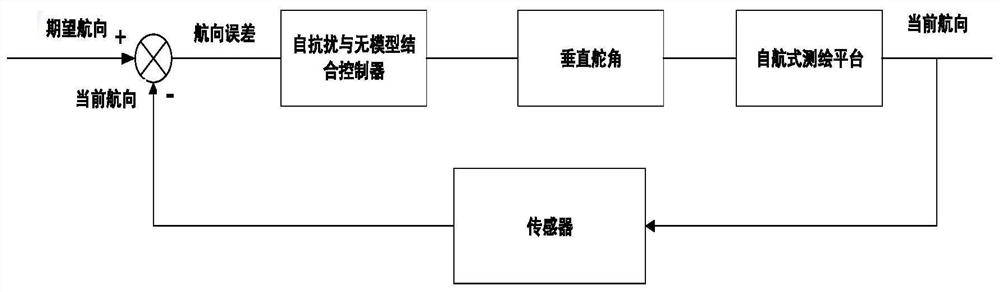
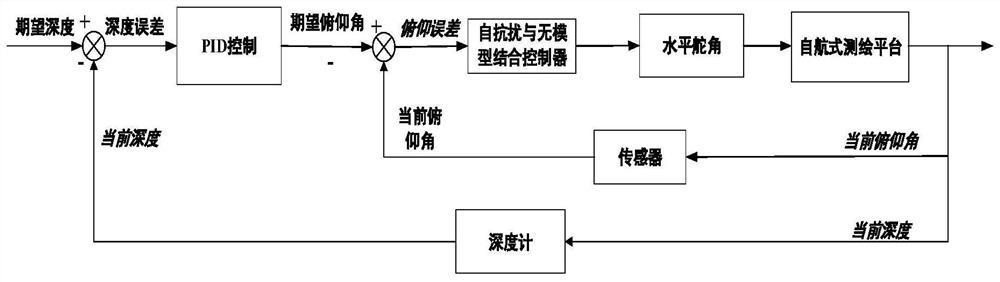
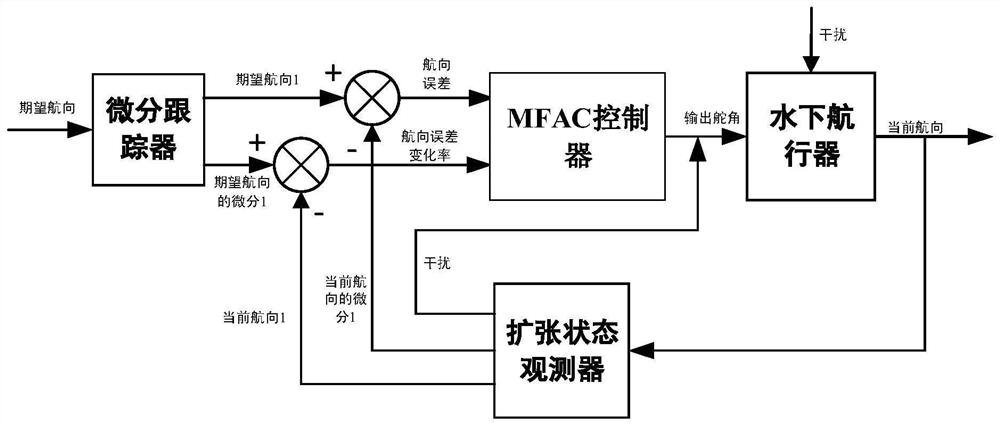
[0051] The invention discloses a model-free self-adaptive AUV control method based on ADRC. First, the differential tracker in the ADRC control is used to arrange the transition process of the input signal and extract its differential signal, and then the extended state observer takes the system's The uncertain disturbance is regarded as the total disturbance, and real-time dynamic estimation and compensation are performed on it, and the signal tracked by the differential tracker is input into the model-free adaptive controller, and finally the disturbance observed by the extended state observer is applied to the Based on the output rudder angle of the model-free adaptive controller, the motion control of AUV is finally realized.
[0052] It mainly realizes the reasonable combination of ADRC and model-free adaptive control, inputs the signal tracked by the differential tracker of ADRC into the model-free adaptive controller, and estimates the extended state observer The distur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More