

Permanent magnet attraction foot type wall-climbing robot
A wall-climbing robot and permanent magnet adsorption technology, applied in the field of wall-climbing robots, can solve the problems of low operation efficiency, high risk, non-planar operation restrictions, etc., and achieve the effect of keeping pace and improving work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following are specific embodiments of the present invention, and further describe the technical solution of the present invention in conjunction with the accompanying drawings, but the present invention is not limited to these embodiments.
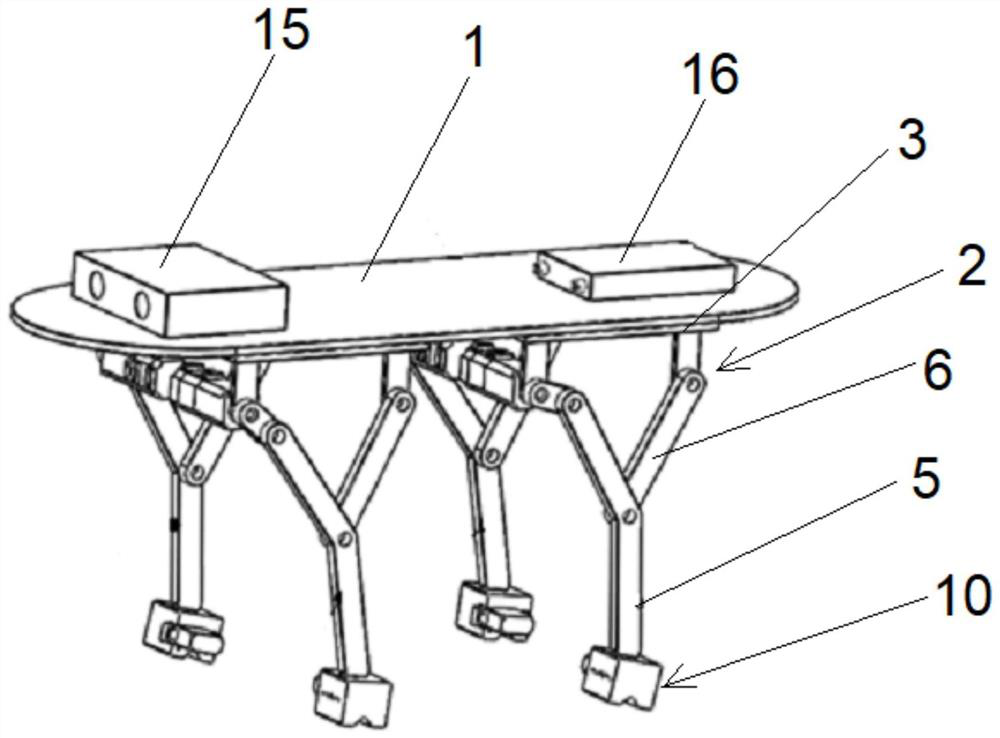
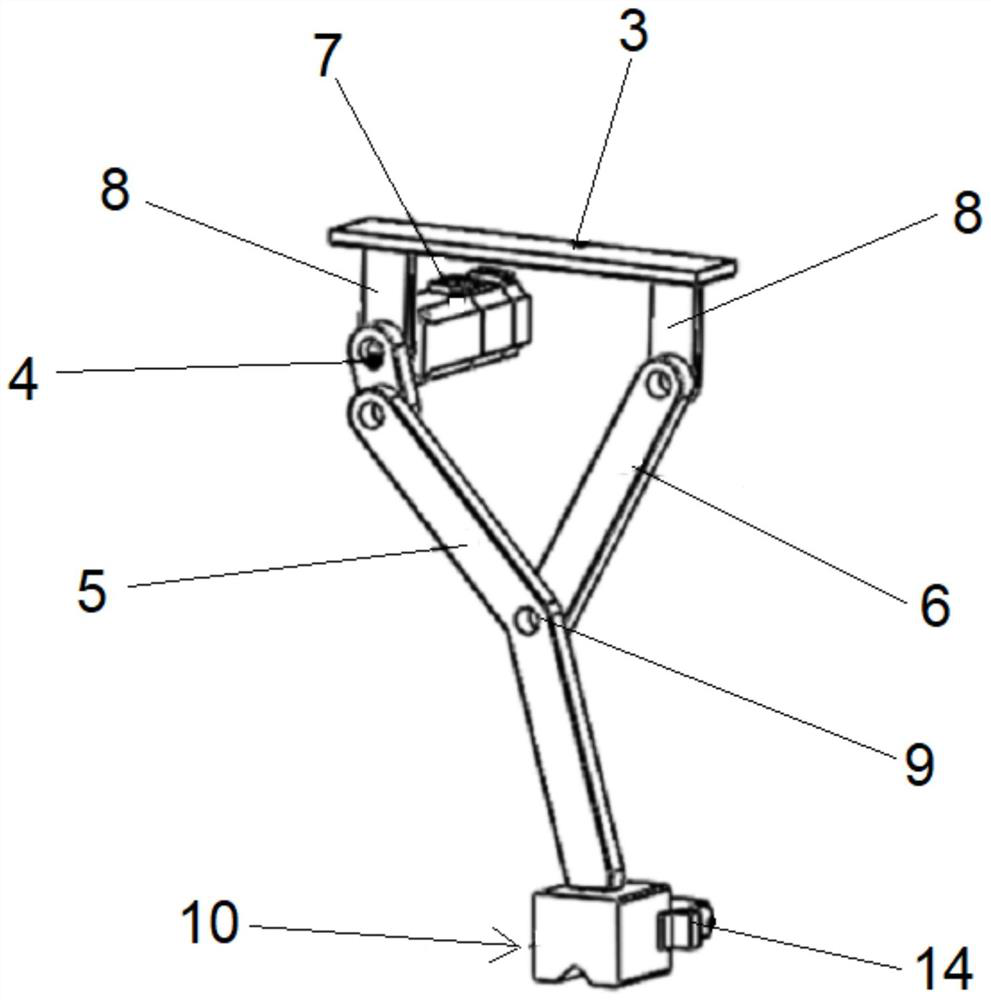
[0022] Such as Figure 1-2 As shown, this wall-climbing robot comprises frame 1, and the lower side of frame 1 is provided with some walking leg mechanisms 2, and walking leg mechanism 2 comprises support 3, connecting rod 4, crank 5, support bar 6 and driving motor 7, and support 3 is fixedly connected to the lower side of the frame 1, two ends of the bracket 3 are respectively provided with a connecting portion 8, one end of the connecting rod 4 is hinged with a connecting portion 8 of the bracket 3, and the other end of the connecting rod 4 is connected to one of the crank 5 The ends are hinged, the crank 5 is provided with a curved portion 9, one end of the support rod 6 is hinged with the other connecting portion 8 of the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More