

Industrial robot fault detection method
An industrial robot, fault detection technology, applied in the direction of instrumentation, electrical testing/monitoring, testing/monitoring control system, etc., can solve the problems of unreserved process variables, difficult monitoring, and poor fault detection effect of industrial robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The following are specific embodiments of the present invention, and further describe the technical solution of the present invention in conjunction with the accompanying drawings, but the present invention is not limited to these embodiments.
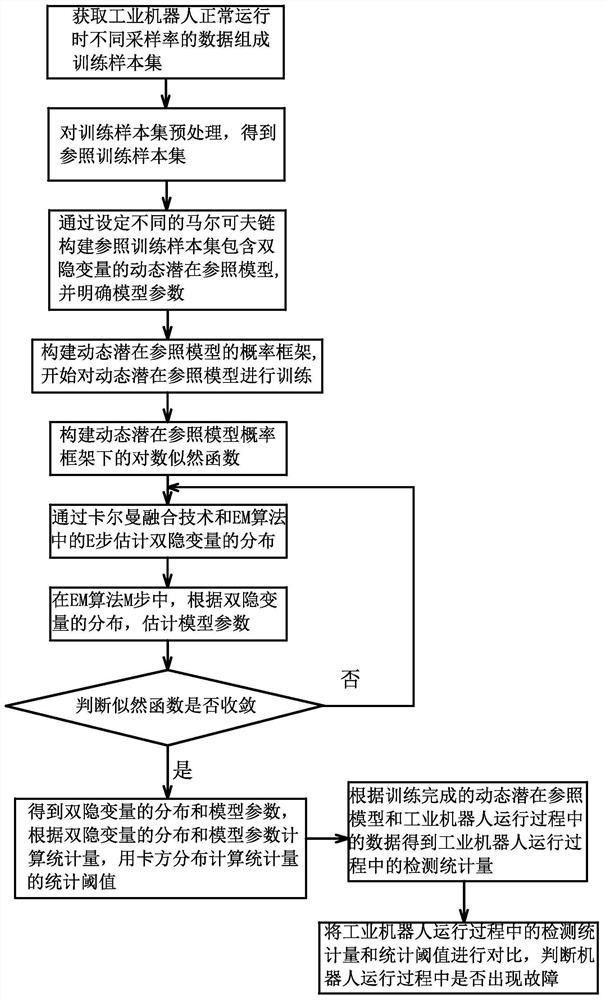
[0074] Such as figure 1 As shown, an industrial robot fault detection method includes:
[0075] Step A: Obtain the data of various sampling rates of the industrial robot during normal operation, and form a multi-sampling rate training sample set for building the model. The data collected at different sampling rates include but are not limited to, The actual position value of the joint measured by the angle and position feedback device, the actual joint speed value obtained by the speed sensor, the effective value of the current, the instantaneous acceleration of the end point of the mechanical arm in the horizontal x-axis direction, and the instantaneous acceleration of the end point of the mechanical arm in the horizontal y-axi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More