

Robot positioning method and robot positioning device
A positioning method and robot technology, applied in the field of robotics, can solve problems such as easy loss, low positioning accuracy of single-sensor SLAM, and inability to locate robots, achieving accurate and effective positioning and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021]In the following, specific implementations of a robot positioning method and positioning device provided by embodiments of the present invention will be described in detail with reference to the accompanying drawings. It should be noted that the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
[0022]To explain one point, in this application document, the default label and Tag mean the same meaning, and the two can be used interchangeably.
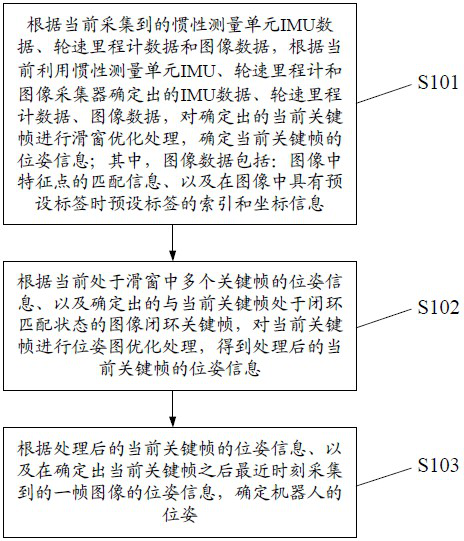
[0023]The embodiment of the present invention provides a robot positioning method, such asfigure 1 As shown, it can include:
[0024]S101. Perform sliding window optimization processing on the determined current key frame according to the currently collected inertial measurement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More