

Line length positioning method and device for feedback control of variable cross-section flexible arm and medium
A feedback control and positioning method technology, which is applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve problems such as being easily affected by the environment, ignoring variable cross-sections, and complex positioning systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be described in detail below with reference to the accompanying drawings and examples.
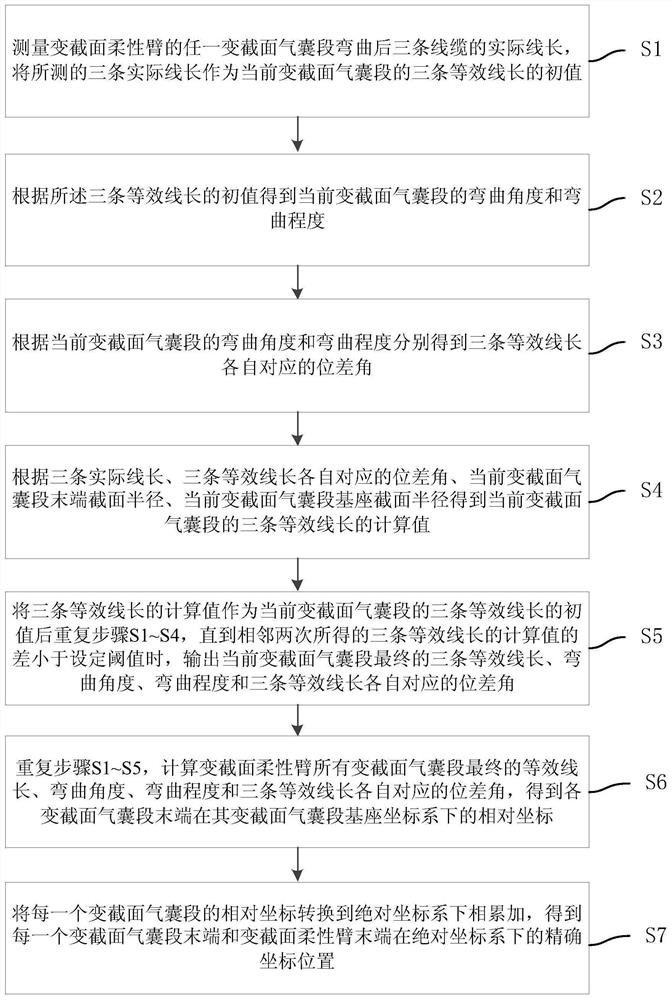
[0062] refer to figure 1 , a preferred embodiment of the present invention provides a method for positioning the wire length of a flexible arm with variable cross-section feedback control, comprising the steps of:
[0063] S1. Measure the actual length of the three cables after any variable-section airbag segment of the variable-section flexible arm is bent The measured three actual line lengths As the length of the three equivalent lines of the current variable-section airbag segment The initial value of i=1, 2, 3; the three cables take the centerline of the variable-section airbag section as the center of rotation before the variable-section airbag section is bent, and are separated by ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More