

Robot grabbing device
A grabbing device and robot technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of damage to the placement station, inability to distinguish mistakes, interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
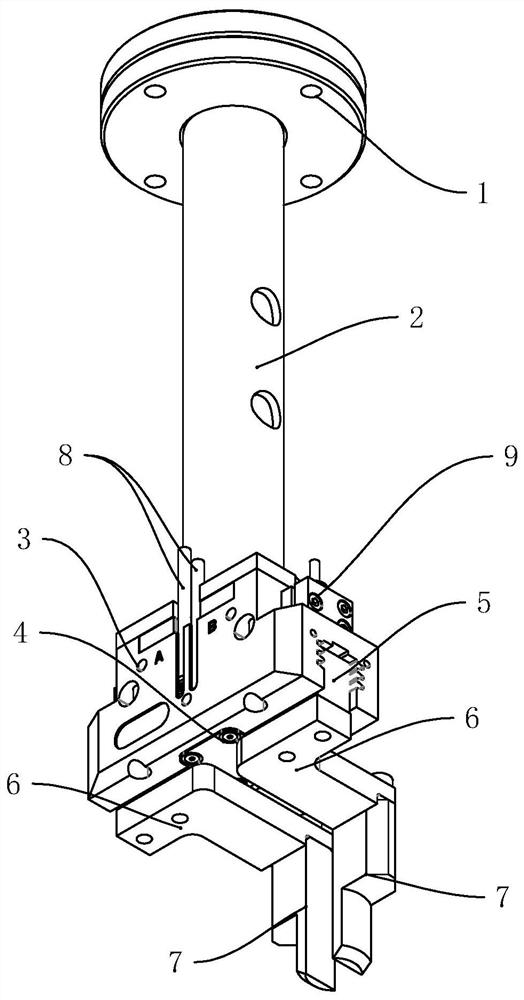
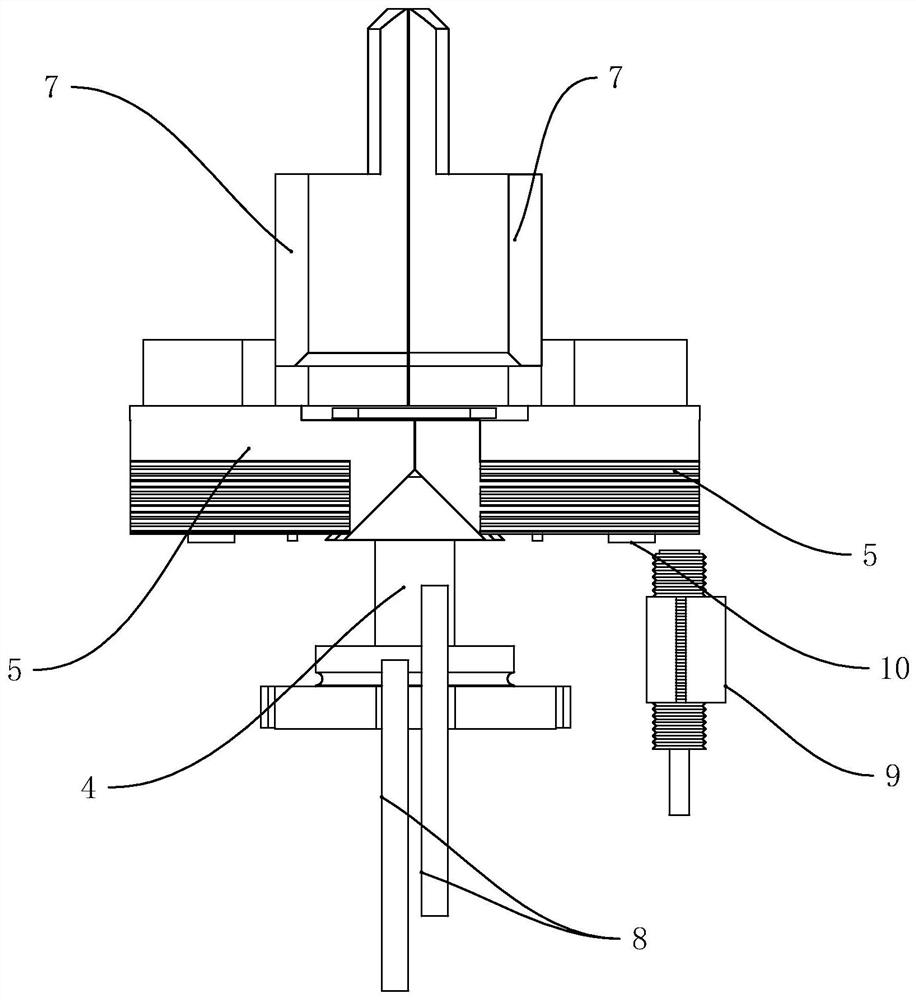
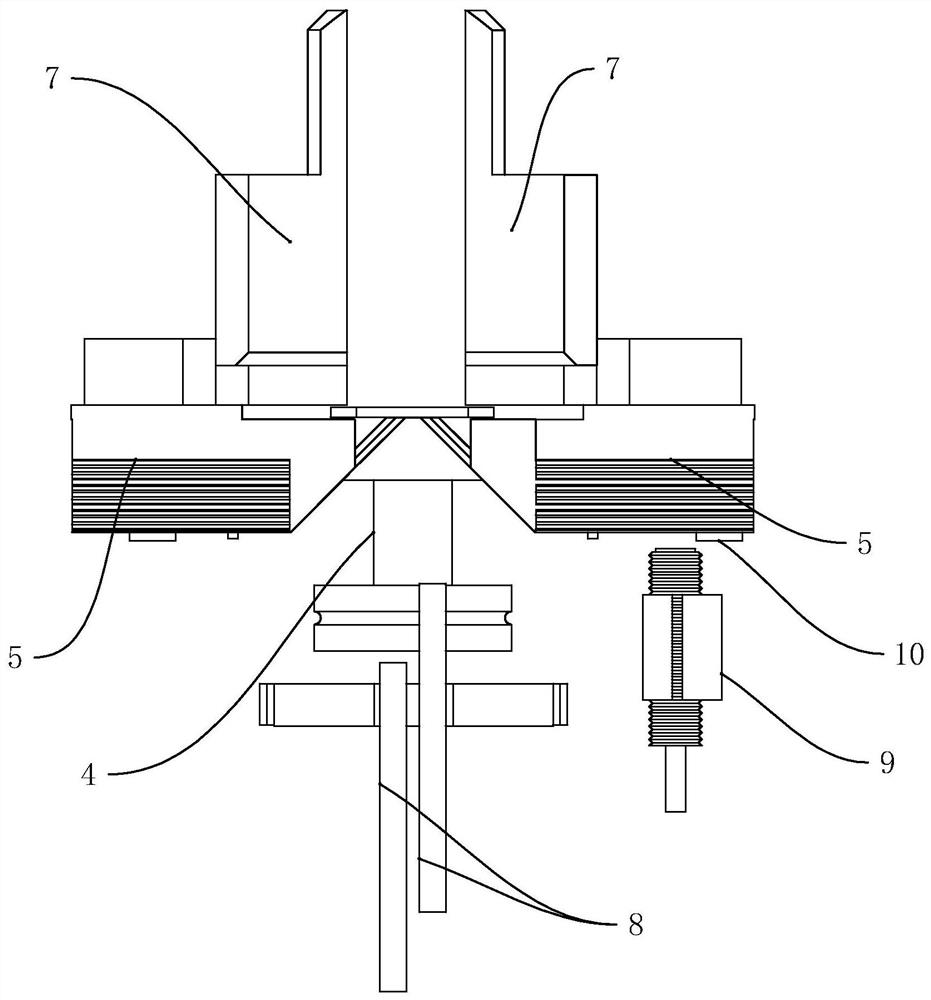
[0011] Such as figure 1 The robot grabbing device shown includes a flange 1 and a connecting rod 2, the flange 1 is used to connect with the robot arm, a cylinder base 3 is fixed at one end of the connecting rod 2, and a cylinder 4 is fixed on the cylinder base 3. A pair of slide blocks 5 are also slidably arranged on the cylinder block 3, such as Figure 2 to Figure 4 The shown cylinder 4 is slidably connected with the two sliders 5 through a pair of V-shaped chutes, and when the cylinder 4 expands and contracts, the two sliders 5 are driven to separate or move closer together under the action of the chutes. Also be respectively provided with connecting plate 6 on two slide blocks 5, be provided with grasping finger 7 respectively on two connecting plates 6, drive connecting plate 6 to move when slide block 5 moves, thereby make two grab fingers 7 Separate or move closer to complete the action of grabbing parts. These two grasping fingers 7 are all parallel to the connectin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More