

Redundancy control method of automatic driving system, automatic driving system, automobile, controller and computer readable storage medium
A redundant control and automatic driving technology, which is applied in the field of automobiles, controllers and computer readable storage media, and automatic driving systems, can solve hardware or software failures and low calculation errors, high complexity of multi-sensor perception fusion systems, lane Line error recognition, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0221]First, it should be noted that each calculation formula in the embodiment of the present invention uses the center of gravity of the vehicle as the origin of the coordinates, and the direction is defined by SAE. In the vehicle coordinate system, the horizontal axis is the y axis (the right side is positive), and the vertical axis is the x axis (the front side is positive). The yaw rate is positive clockwise, and the steering wheel angle is positive left and negative right. The change of the vehicle coordinate system does not affect the physical meaning of the calculation results of this plan and the implementation of the plan.
[0222]The embodiment of the present invention provides a redundant control method applied to a high-level automatic driving system (level 4 or 5) and a middle-level automatic driving system (level 2.5 or 3).
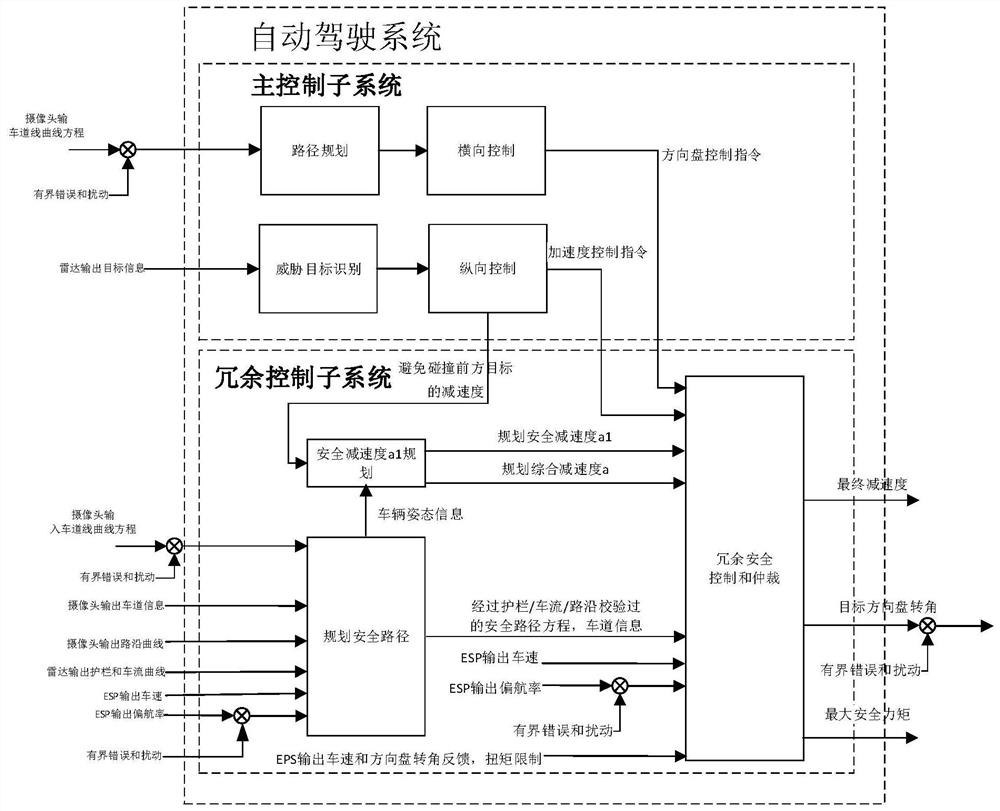
[0223]For high-level autonomous driving systems and mid-level autonomous driving systems, both includefigure 1 The main control subsystem and redundan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More