

Multi-robot finite time synchronous control method based on membrane calculation
A multi-robot, limited-time technology, applied in the field of robotics research, which can solve problems such as limited-time synchronization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
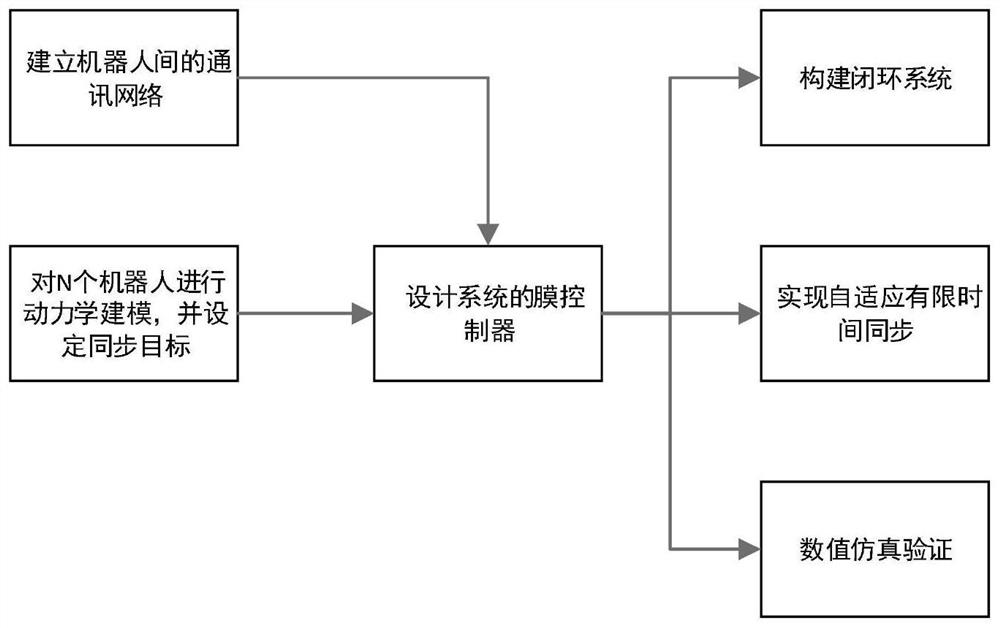
[0041] Please refer to figure 1 , the present invention provides a multi-robot finite-time synchronous control method based on membrane computing, comprising the following steps:
[0042] Step 1: Establish a communication network between multi-robots, and describe the mutual communication between all robots in the multi-robot system;
[0043] The communication network is specifically in represents all robots υ i composed of collections, N is the number of robots in the system; represents a collection of channels, Represents the external coupling matrix; the elements in the channel set (υ i , υ j ) ∈ ε represents the robot υ i and robot υ j Correlation signals can be obtained between each other, assuming The robot in has M channels, and i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More