

Method for automatically obtaining optimal operation path of unmanned crown block
An automatic acquisition and crane technology, applied in the direction of motor vehicles, vehicle position/route/height control, design optimization/simulation, etc., can solve problems such as unreasonable route selection, low operation efficiency, and impact on the business of the warehouse area, and achieve improvement Crane operation efficiency, reduction in the probability of deceleration, and the effect of shortening the number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to make the purpose, technical solutions and advantages of the invention implementation cases clearer, the technical solutions in the implementation cases of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the implementation cases. Obviously, the implementation cases described are the present invention Invention of a small part of the implementation cases, not all of the implementation cases, based on the implementation cases in the present invention, all other implementation cases obtained by those of ordinary skill in the art without creative work, all belong to the protection scope of the present invention.
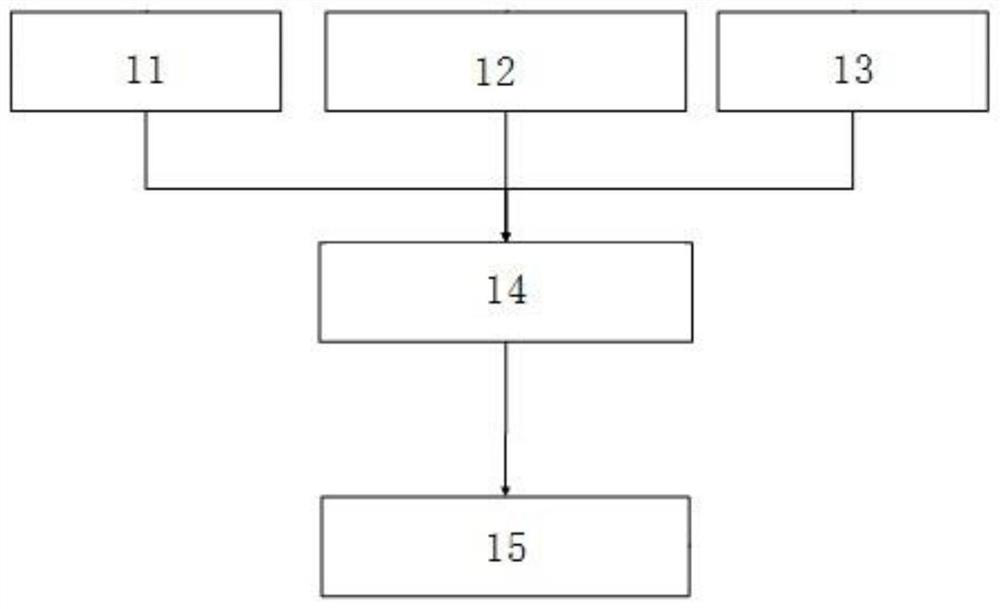
[0014] A method for automatically obtaining the optimal operation path of an unmanned crane, comprising the following steps: Step 1, data information setting, including work order information management 11, crane status information management 12, and database configuration 13; Step 2, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More