

Trajectory tracking control algorithm for pneumatic muscle driving system
A driving system, trajectory tracking technology, applied in the direction of program control manipulator, manufacturing tool, manipulator, etc., can solve the problem of inconvenient practical application of the controller
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
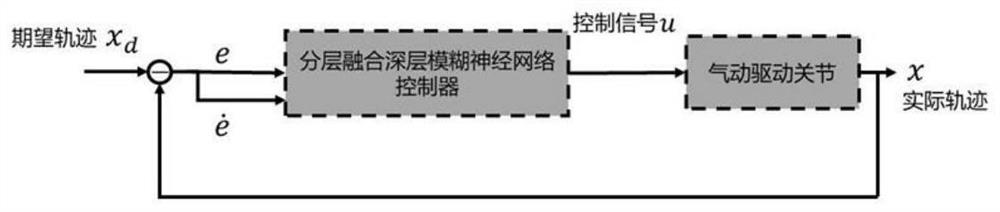
[0089] Such as figure 1 As shown, a trajectory tracking control algorithm for the pneumatic muscle drive system provided by the embodiment of the present invention includes:
[0090] Input the desired trajectory of the pneumatic muscle drive system;
[0091] determining a tracking error based on the fed back actual trajectory of said pneumatic muscle drive system;
[0092] obtaining a tracking error derivative through the tracking error;
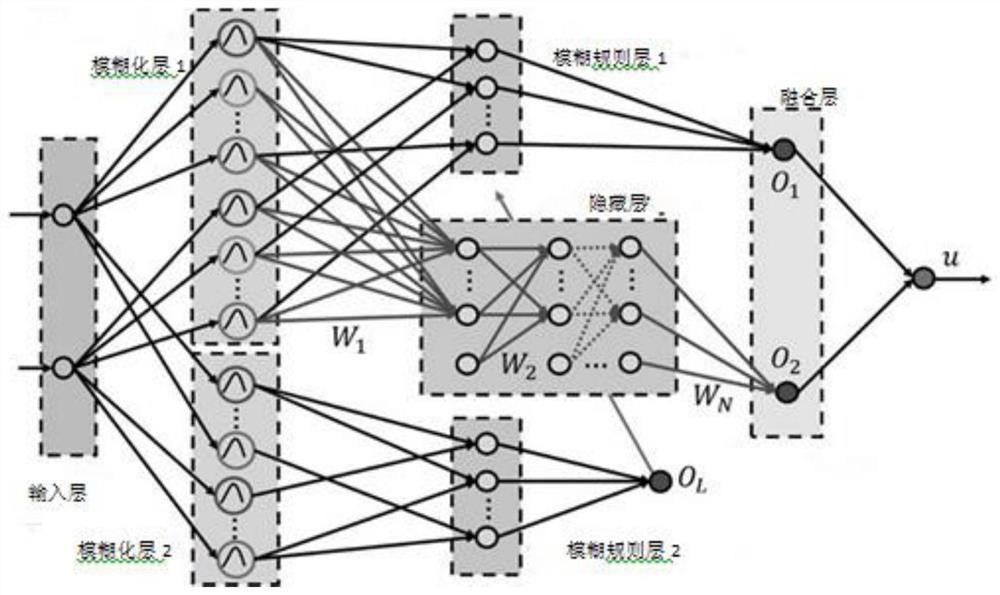
[0093] Obtaining a control signal by combining the tracking error and the tracking error derivative according to the layered fusion deep fuzzy neural network;
[0094] transmitting said control signal to a pneumatically driven ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More