

Ship control method based on competitive hybrid network
A hybrid network and control method technology, applied in neural learning methods, biological neural network models, instruments, etc., can solve problems such as low ship control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0039] Specific implementation mode one: the specific process of the ship control method based on the competitive hybrid network in this implementation mode is as follows:
[0040] Step 1. Establishing an individual agent network model;
[0041] Step 2. Establish a dominant hybrid network model;
[0042] Step 3. Establish a state-value hybrid network model;
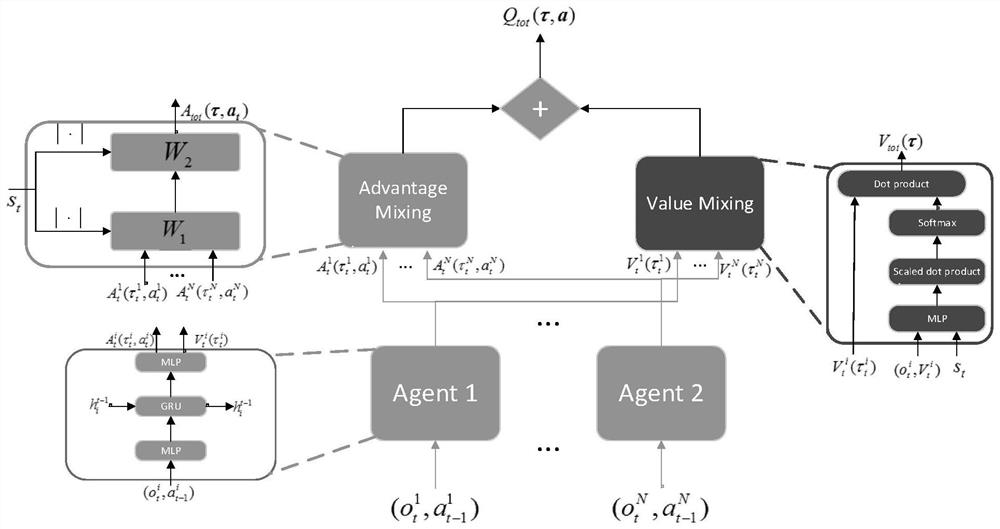
[0043] Step 4: Input the individual observation history into the individual agent network model to obtain the individual advantage value function A i (τ i ,a i ) and the individual state value function V i (τ i );
[0044] The individual advantage value function A i (τ i ,a i ) is passed to the dominant mixed network model, and the dominant mixed network model outputs the joint advantage function value A tot (τ,a);
[0045] The individual state value function V i (τ i ) is passed to the state value mixed network model, and the state value mixed network model outputs the joint state value mixed value V tot (τ...
specific Embodiment approach 2
[0052] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the individual agent network model is established in the step one; the specific process is:
[0053] The individual agent network model includes n agent network structures (the number of n depends on the specific application scenario);
[0054] The network structure of each agent is the same, consisting of Group1 and Group2;
[0055] Group1 includes an input layer, a ReLU activation layer, a GRU unit and the first linear network layer;
[0056] The output end of the input layer is connected to the input end of the ReLU activation layer, the output end of the ReLU activation layer is connected to the input end of the GRU unit, and the output end of the GRU unit is connected to the first linear network layer;
[0057] These structures are connected in series.
[0058] The input layer accepts the observation history of the agent, and the observation history consists of the loc...
specific Embodiment approach 3
[0064] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is that: in the step two, a dominant hybrid network model is established; specifically:
[0065] The advantage hybrid network model consists of a parameter network structure and a super network structure;
[0066] The parameter network structure includes a fourth linear network layer and a fifth linear network layer, the fourth linear network layer and the fifth linear network layer are connected in parallel, and the inputs of the fourth linear network layer and the fifth linear network layer are global observations;
[0067] The fourth linear network layer processes the input global observation value to obtain an output value, which is used as the parameter matrix of the first layer network in the hypernetwork structure;
[0068] The fifth linear network layer processes the input global observation value to obtain the output value as the param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More