Servo control method for parallel redundant flexible cable mechanism based on hyper-ellipsoid mapping analytical algorithm
An analytical algorithm and servo control technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as control rate and solution efficiency, and achieve the effect of continuous control of tension, suppression of high-frequency vibration, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
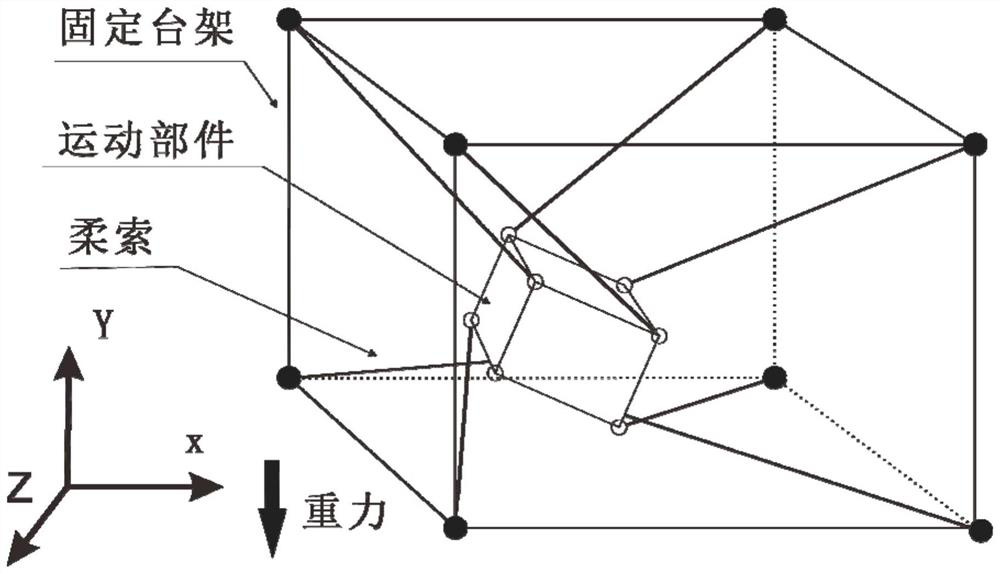
[0070] In order to fully understand the characteristics of the present invention and its applicability for engineering practice, the present invention establishes as figure 2 The shown parallel redundant cable mechanism and load constrained environment, 2 degrees of freedom redundant space parallel cable mechanism, the basic dimensions are shown in the following table:
[0071]
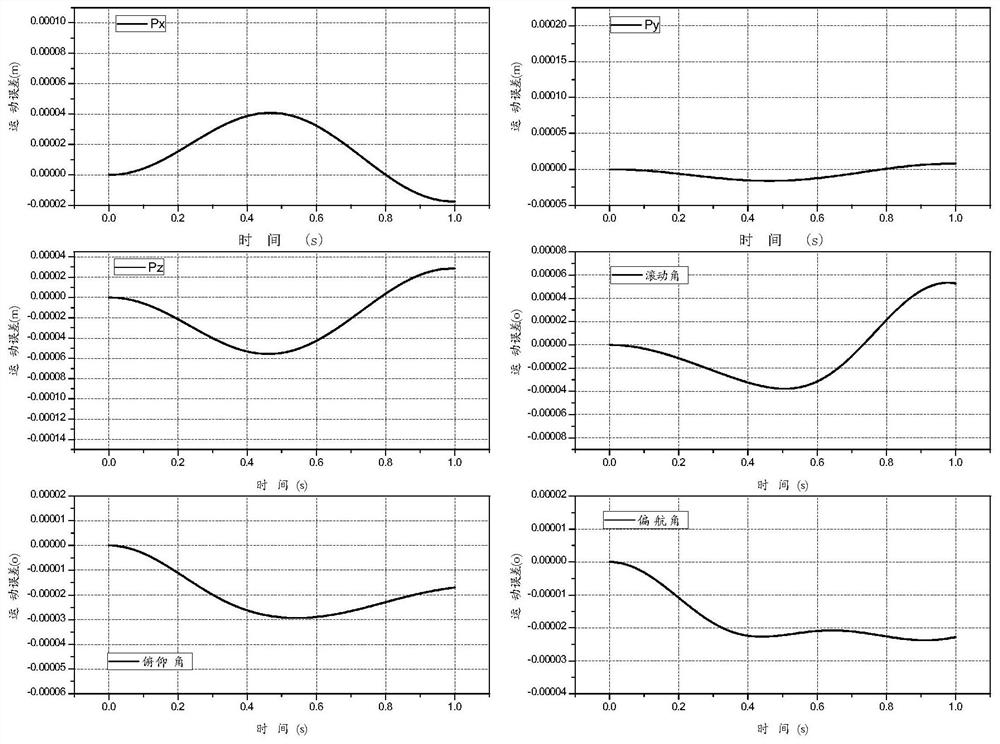
[0072] The target trajectory is a straight line between the start point and the end point, and the displacement trajectory is as follows
[0073]
[0074] where T=1s, T a =0.5s, T c = 0s, and represents the complete motion time, acceleration time, constant speed time, v 2 is the uniform speed. The status information of the starting point and the ending point is as follows
[0075]
[0076] In order to more accurately describe the actual environment encountered in the servo control process of the mechanism, the maximum additional boundary is the load disturbance of [-0.3, +0.3], the maxim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



