

Path tracking anti-saturation robust control method for under-actuated water surface ship
A path tracking and robust control technology, applied in non-electric variable control, two-dimensional position/channel control, vehicle position/route/altitude control, etc. Consider the tracking error constraint problem and other issues to achieve the effect of high tracking accuracy and improved tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings.
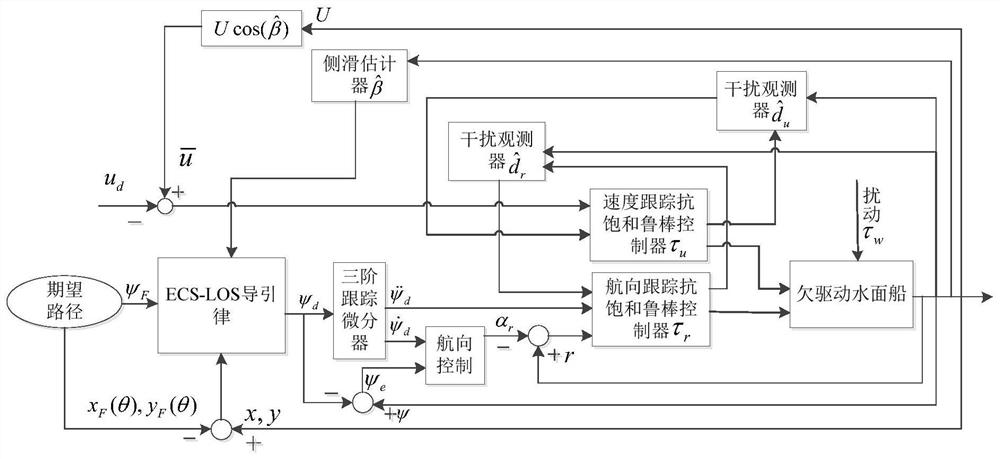
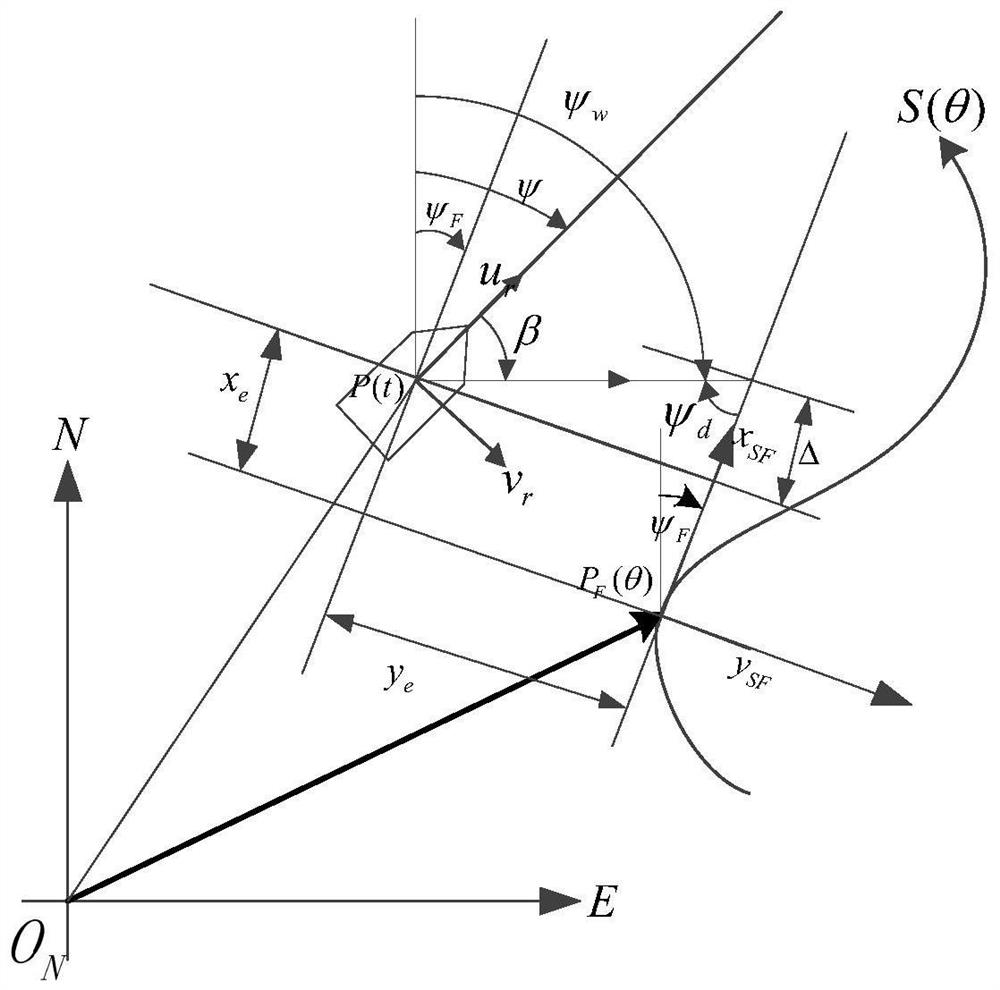
[0059] The invention proposes an underactuated surface vessel path tracking control problem for the underactuated surface vessel under the conditions of uncertain model, unknown external environment interference, time-varying sideslip, limited actuator input and limited tracking error. Path-following anti-saturation robust control method for surface ships. First, considering the problem of limited tracking error, the error-limited side-slip compensation ECS-LOS guidance law is designed through the obstacle Lyapunov function, and the side-slip estimator is used to compensate the time-varying side-slip angle, and the tracking error will not exceed the limited range, the path tracking accuracy of the underactuated surface ship is improved; secondly, a path tracking robust controller is designed by backstepping method, and the disturbance observer is used to observe the un...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More