

Topological perception routing method for unmanned aerial vehicle cluster formation
A UAV and routing technology, applied in network topology, wireless communication, vehicle position/route/altitude control, etc., can solve the problem that does not take into account the particularity of UAV cluster formation flight scenarios, topology perception delay, P-OLSR The protocol cannot adapt well to problems such as network topology changes, so as to achieve the effect of dynamically changing the sensing frequency and reducing network overhead
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment
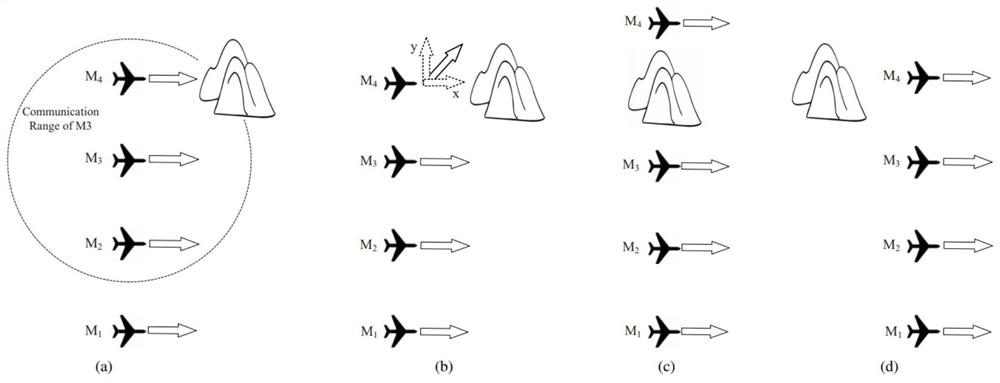
[0052] Such as figure 1 In the specific scenario shown, four UAVs perform formation tasks in a line. When the UAV node M 4 When an obstacle is detected ahead, it is necessary to perform an obstacle avoidance task. At this time, the formation has changed. The following is the UAV node M 4 The obstacle avoidance process of the present invention is simply described to the specific implementation of the present invention, and for ease of explanation, the flight model of simplified unmanned aerial vehicle is 2 dimensions.
[0053] Refer to attached figure 1 , assuming that the initial distance between the UAV nodes is 300m, and the one-hop communication coverage radius of the UAV is 400m, when the UAV is at the stage shown in Figure (a), the UAV node at this time is in stage, the nodes remain relatively stationary, and the node M 4 and M 3 The relative distance at time a Calculated by the following formula:
[0054]
[0055] At this time, the relative distance change can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More