Dangerous scene identification method and system based on graph classification
A scene recognition and dangerous technology, applied in the field of automobile intelligent interaction, can solve the problems of no unified framework to represent traffic scenes, high technical difficulty, low accuracy of traffic hazard scene recognition, etc., to save recognition computing resources, save computing resources, The effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
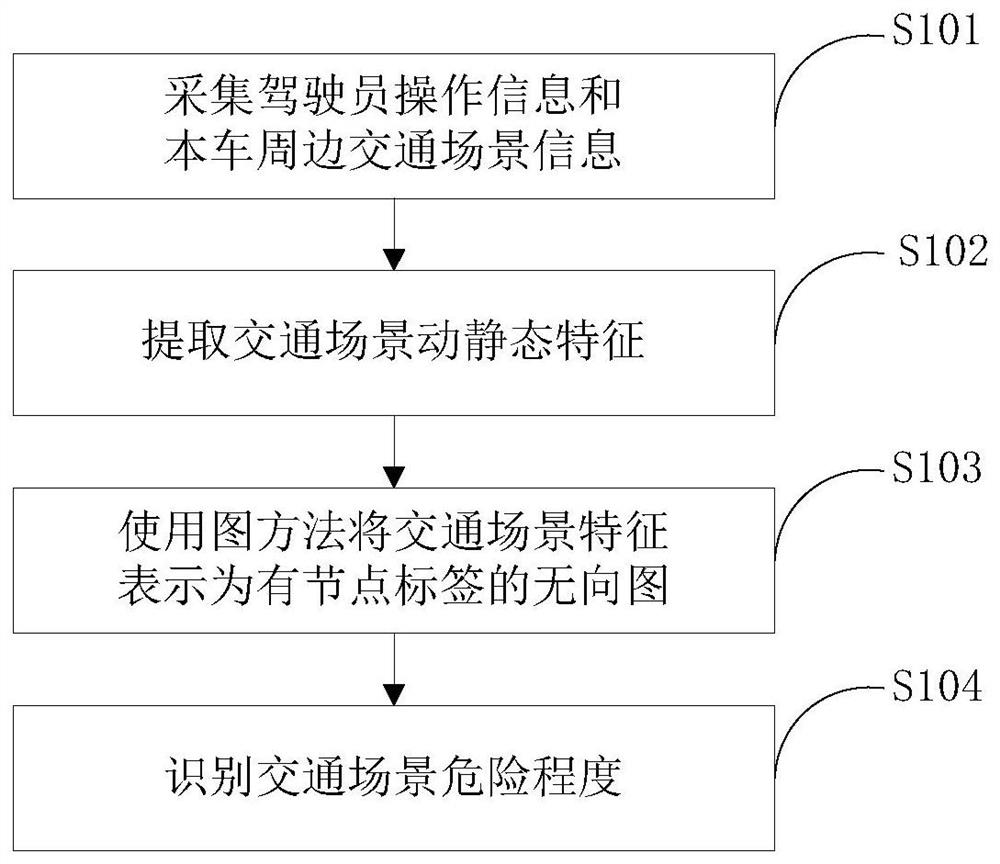
[0047] Such as figure 1 As shown, a graph classification-based urban traffic environment dangerous scene recognition method disclosed in this embodiment, the specific implementation method is as follows:
[0048] Step S101 , extract driving characteristic parameters according to the collected driver's operation information, and use a monocular camera and a laser radar to collect traffic scene information around the vehicle.
[0049] Specifically, the driver's operation information is collected through the vehicle CAN bus, and the vehicle driving information of the driving vehicle is collected through the equipment sensors arranged on the vehicle. The vehicle driving information includes the vehicle's speed information, attitude information, current vehicle condition information, vehicle driving trajectory information etc. The monocular camera installed on the front window collects the image information of the traffic scene from the perspective of the driver, and the laser rad...
Embodiment 2
[0063] Such as figure 2 As shown, this embodiment discloses a system for identifying dangerous scenes in urban traffic environments based on graph classification, and the system specifically includes a data collection module, a traffic scene feature extraction module, a graph scene representation module, and a dangerous scene recognition module;
[0064] The data acquisition module is used to extract driving characteristic parameters according to the collected driver's operation information, and collect traffic scene information around the vehicle by using a monocular camera and a laser radar;
[0065] The data acquisition module collects the driver's operation information through the CAN bus, and collects the vehicle driving information of the driving vehicle through the equipment sensors arranged on the vehicle. The vehicle driving information includes the vehicle's speed information, attitude information, current vehicle condition information, and vehicle trajectory informa...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap