Real object programming control method based on distance
A technology of physical programming and control method, applied in the field of physical programming, can solve the problems of complex and cumbersome adjustment process, achieve the effects of simple and convenient operation, expand the adjustment range and reduce the production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
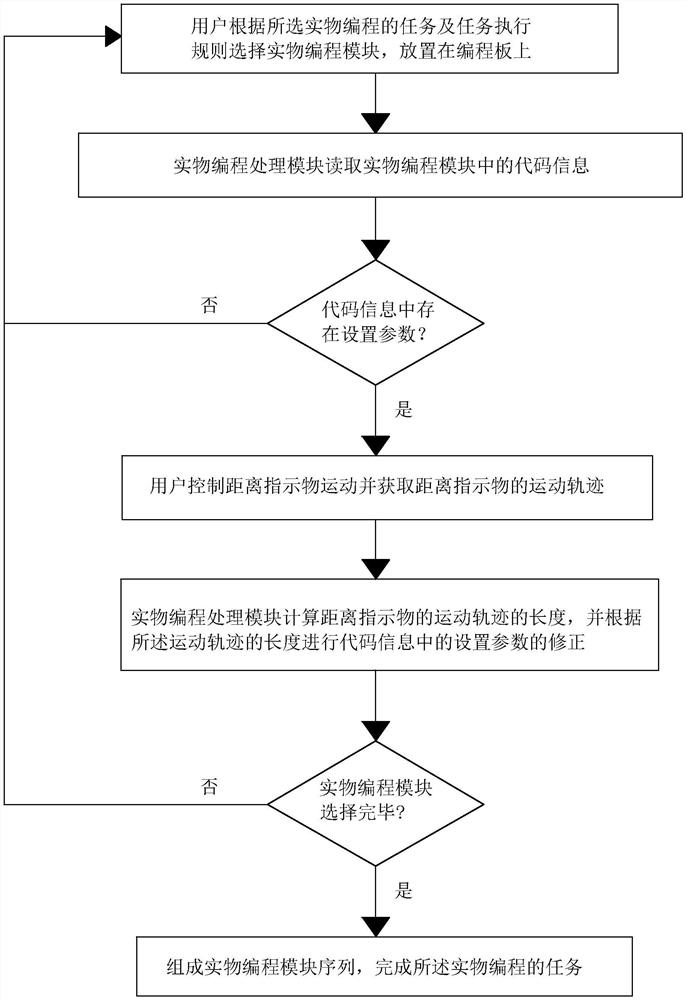
[0035] Embodiment: a kind of distance-based object programming control method of the present embodiment, such as figure 1 As shown, the following steps are included:
[0036] S1. The user selects the physical programming module according to the selected physical programming task and task execution rules, and places it on the programming board;
[0037] S2, the object programming processing module reads the code information in the object programming module, and judges whether there are setting parameters in the code information, if the setting parameters exist, then jump to step S3, otherwise, if the setting parameters do not exist, then jump to step S5;
[0038] S3. The user controls the movement of the distance indicator and obtains the movement track of the distance indicator;
[0039] S4. The object programming processing module calculates the length of the motion track of the distance indicator, and corrects the setting parameters in the code information according to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More