
Eureka
For R&D, Eureka makes reading and utilizing patents & technical documents easy.
Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Unmanned aerial vehicle obstacle avoidance method and device, unmanned aerial vehicle and storage medium
A UAV, obstacle avoidance technology, applied in the field of UAV, can solve problems such as crossing the border
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
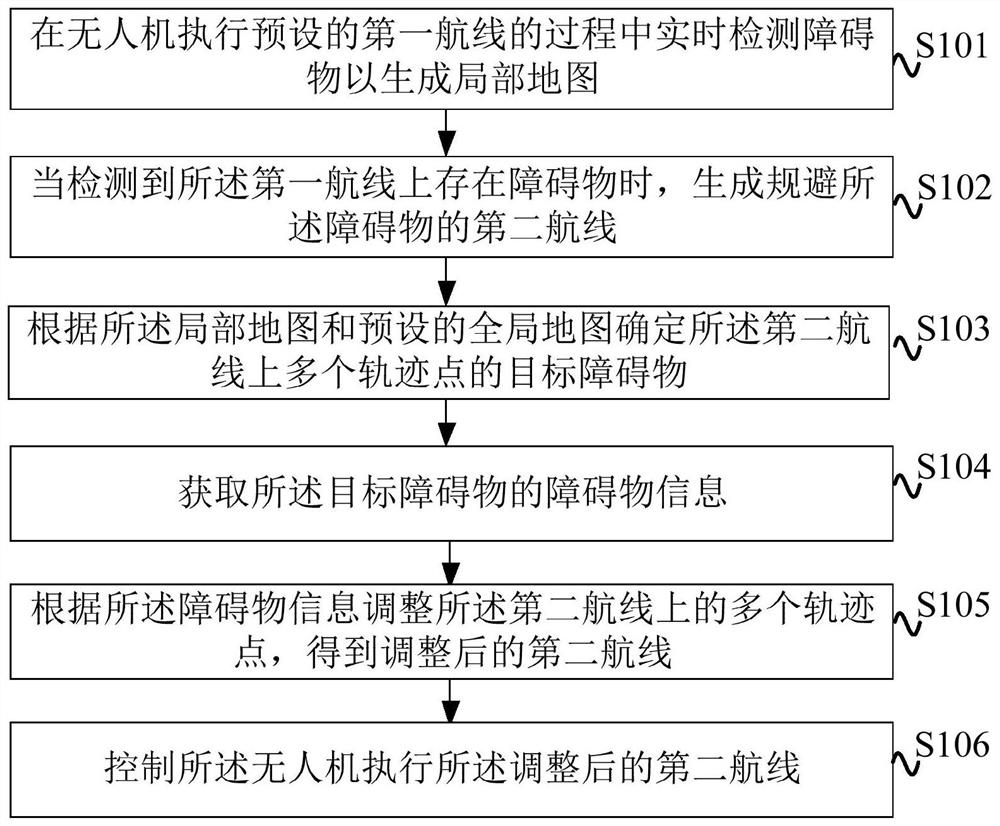
[0036] figure 1 It is a flow chart of a UAV obstacle avoidance method provided by Embodiment 1 of the present invention. This embodiment of the present invention is applicable to the situation of UAV performing obstacle avoidance during operations. The method can be implemented by the UAV in the embodiment of the present invention obstacle avoidance device, which can be implemented in the form of software and / or hardware, and integrated in the drone of the present invention, such as figure 1 As shown, the UAV obstacle avoidance method specifically includes the following steps:
[0037] S101. Real-time detection of obstacles during the execution of the preset first route by the UAV to generate a local map.
[0038] In the embodiment of the present invention, before the UAV performs the operation, the user can retrieve the global map of the operation area at the ground station, and pre-set the boundary of the operation area, no-fly area, obstacles, etc. on the global map, and t...
Embodiment 2
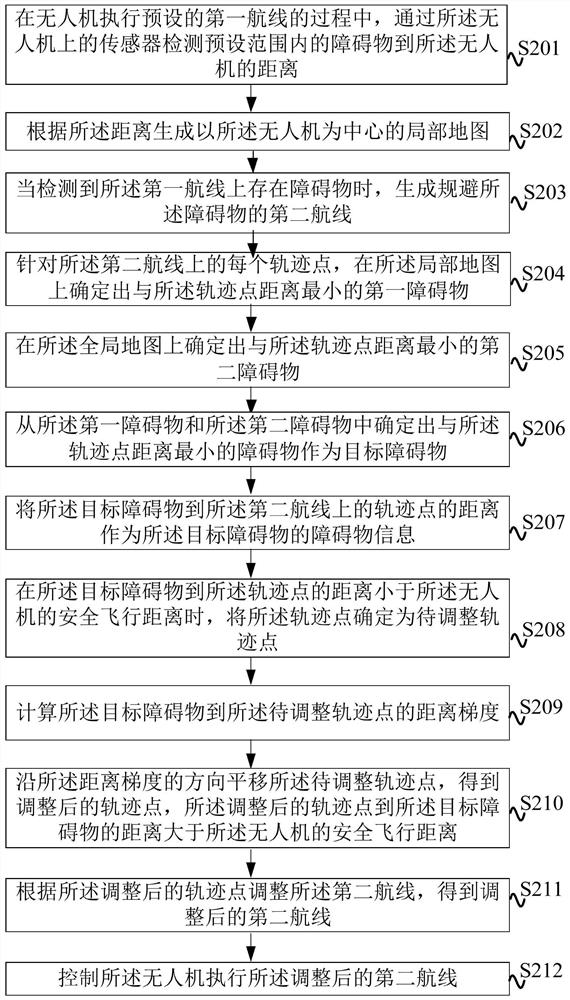
[0056] figure 2 It is a flow chart of a UAV obstacle avoidance method provided by Embodiment 2 of the present invention. The embodiment of the present invention is optimized on the basis of the foregoing Embodiment 1. Specifically, as figure 2 As shown, the UAV obstacle avoidance method in the embodiment of the present invention may include the following steps:
[0057] S201. During the process of the UAV executing a preset first route, a sensor on the UAV detects a distance from an obstacle within a preset range to the UAV.
[0058] In the embodiment of the present invention, the sensor may be at least one of a millimeter-wave radar, a monocular camera, a double-sided camera, etc., and the preset first route may be a pre-generated operation route in the operation area, such as a plant protection area The plant protection route can also be a surveying and mapping route in the surveying and mapping area. Taking the millimeter-wave radar sensor as an example, when the UAV ex...
Embodiment 3
[0105] Figure 9 A schematic structural diagram of an unmanned aerial vehicle obstacle avoidance device provided in Embodiment 3 of the present invention, as shown in Figure 9 As shown, the UAV obstacle avoidance device of the embodiment of the present invention includes:
[0106] A local map generating module 301, configured to detect obstacles in real time to generate a local map during the execution of the preset first route by the drone;
[0107] The second route generating module 302 is configured to generate a second route that avoids the obstacle when an obstacle is detected on the first route;
[0108] A target obstacle determination module 303, configured to determine target obstacles at multiple track points on the second route according to the local map and the preset global map;
[0109] Obstacle information acquisition module 304, configured to acquire obstacle information of the target obstacle;
[0110] The second route adjustment module 305 is configured to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com