

Real-time identification method of hickory nut fruits in image based on machine vision
A technology of machine vision and recognition methods, applied in image enhancement, image analysis, image data processing and other directions, can solve problems such as unsystematic research
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
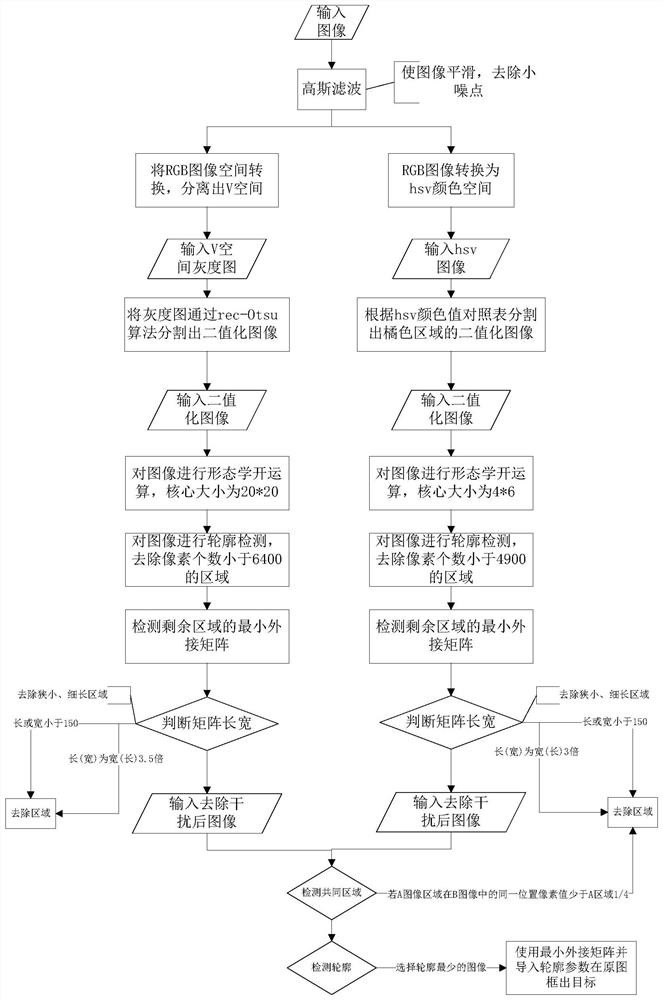
[0029] Such as figure 1 Shown, the present invention comprises the following steps:
[0030] 1) Perform down-sampling processing on the image collected by the camera, reduce the image resolution, and obtain the down-sampled image; the sampling device is a mountain dog A8 motion camera, and the resolution of the original image is 8000*6000. In order to reduce the processing time of the computer, use ACDsee The software changes the resolution of the original image to 4000*3000.
[0031] 2) Smooth and denoise the downsampled image to obtain a denoised image;
[0032] In a specific implementation, Gaussian filtering is used to perform smoothing and denoising processing on the down-sampled image...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More