

Calibration method and system, robot, computer device and navigation system
A calibration method and robot technology, which can be used in computing, measuring devices, using optical devices, etc., and can solve problems such as time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0040] Exemplary embodiments of the present invention will be described in detail below with reference to the accompanying drawings. The exemplary embodiments described below and illustrated in the accompanying drawings are intended to teach the principles of the invention and enable those skilled in the art to implement and use the invention in a number of different environments and for a number of different applications. Therefore, the protection scope of the present invention is defined by the appended claims, and the exemplary embodiments are not intended and should not be considered as a limiting description of the protection scope of the present invention.
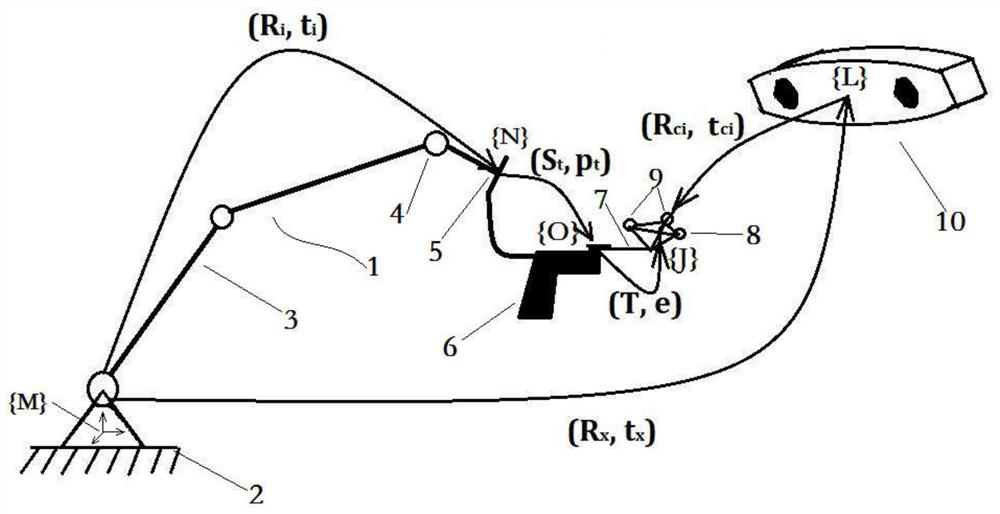
[0041] figure 1 A hand-eye calibration system suitable for a knee joint surgical robot according to the present invention is schematically shown.
[0042]
[0043] exist figure 1 Among them, the operating system used for eg knee joint surgery includes a surgical robot 1 fixed on a base 2, and a joint 4-type robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More