

Pan-tilt control method and pan-tilt
A control method and PTZ technology, applied in the PTZ field, can solve the problems of inconvenient control of the screen direction of the operator, inability to give full play to the different characteristics of the control device, and poorly defined function design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
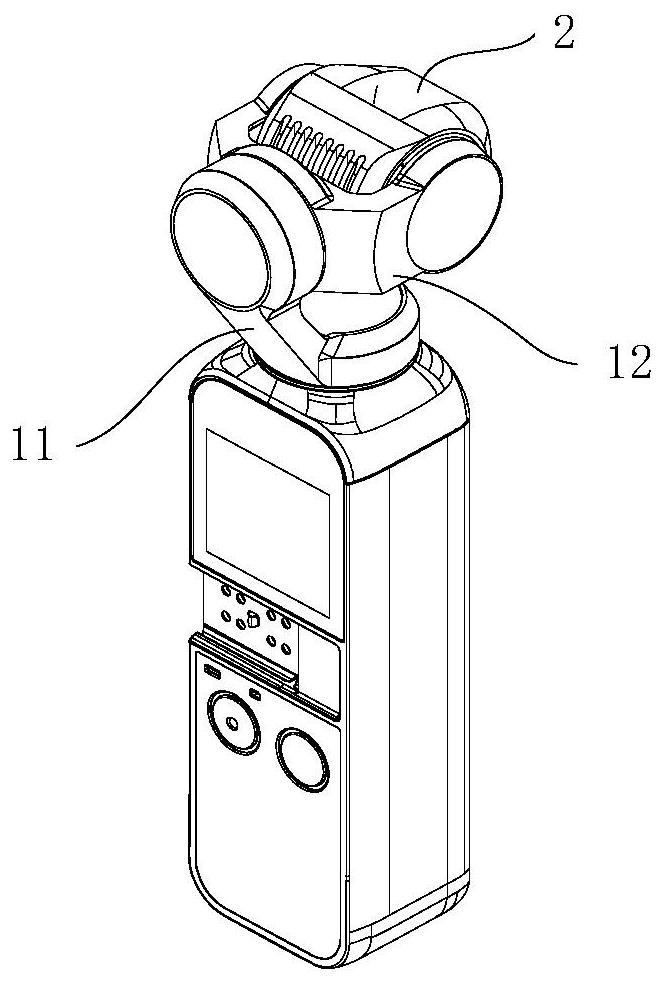
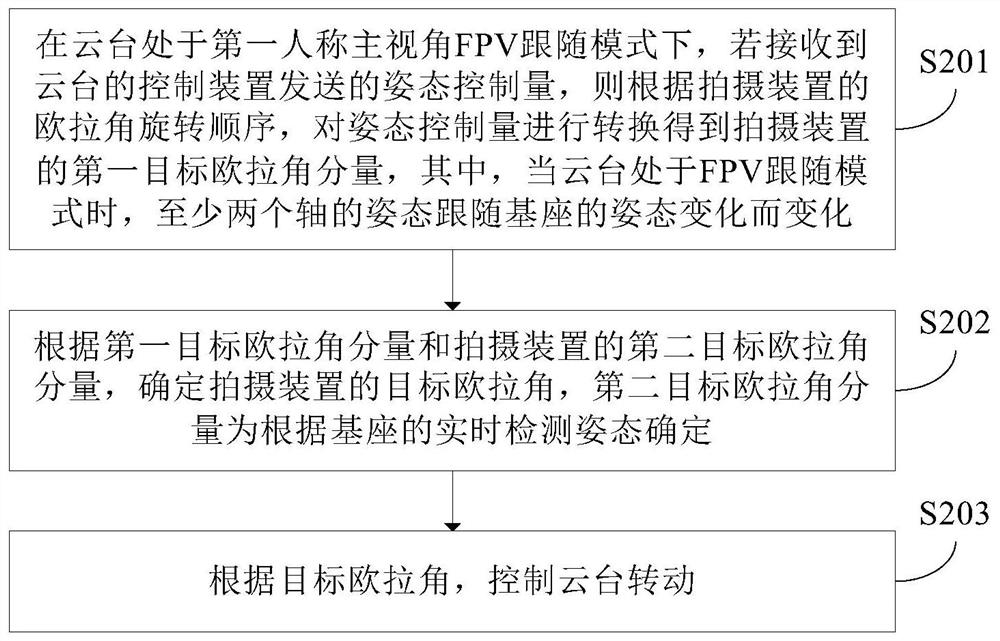
[0028] In the FPV (First Person View) following mode of the existing gimbal, joystick control can be realized on the joint coordinate system. For example, when the control device is a remote control, the amount of stick generated by the remote sensor may correspond to a joint Angle rotation, the gimbal controls one joint angle correspondingly, and other joint angles are not affected. The picture captured by the shooting device rotates around the joint coordinate system, and the picture may not meet the user's expectations. Therefore, this method of realizing joystick control on the joint coordinate system The method is not convenient for the operator to realize the control of the screen direction. Among them, in the joint coordinate system, each axis of the gimbal moves independently.
[0029] For this, the application converts the attitude control amount sent by the control device to obtain the first target Euler angle component of the shooting device according to the Euler a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More