Collection method of data set for robot error calibration, equipment and storage medium
An error calibration and collection method technology, applied in instruments, manipulators, measuring instruments, etc., can solve the problems of long time and low efficiency, and achieve the effect of short time, improve data collection efficiency, and facilitate error calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below, the present invention will be further described in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, under the premise of not conflicting, the various embodiments described below or the technical features can be combined arbitrarily to form new embodiments. .
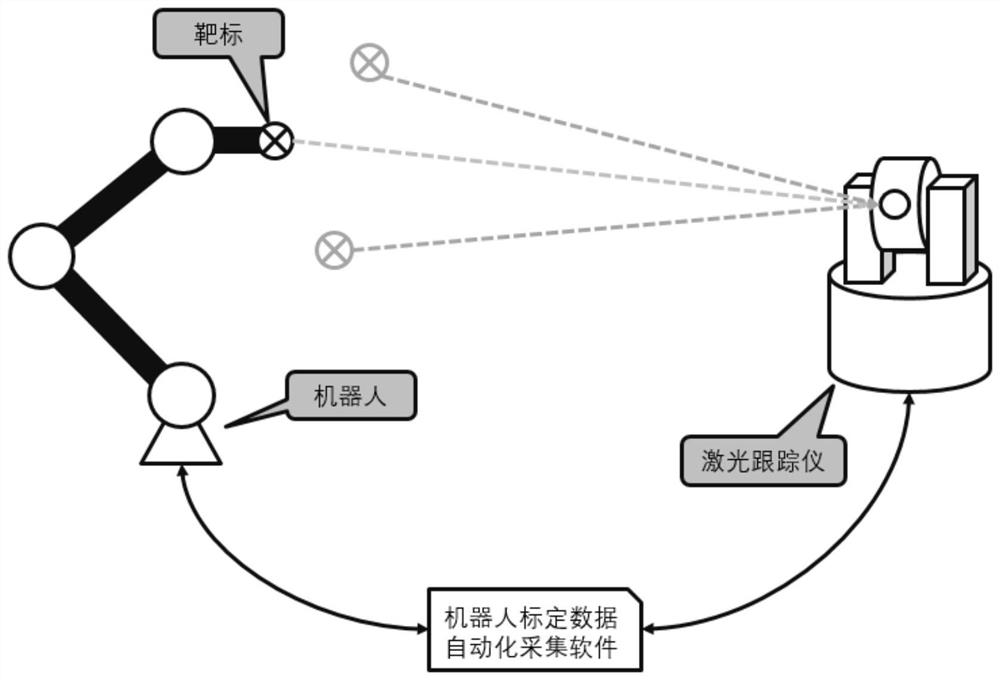
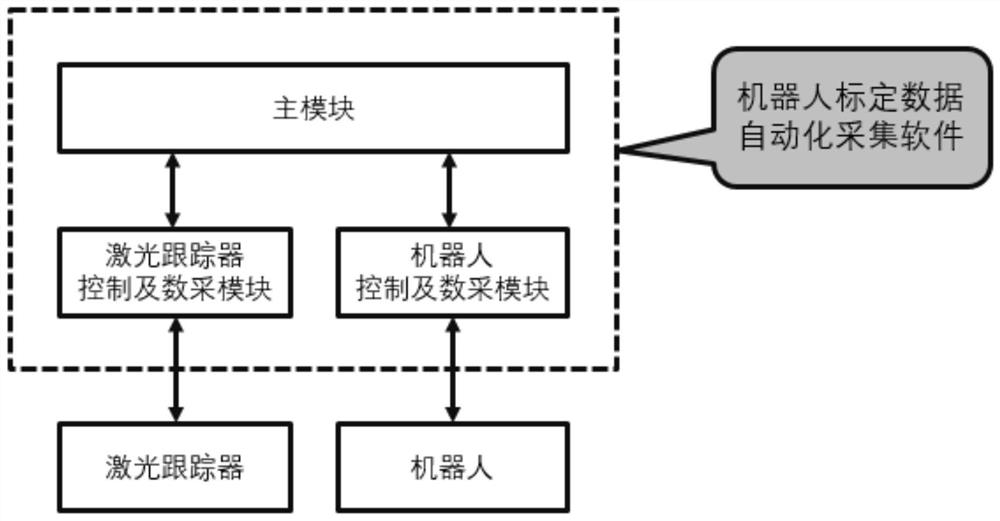
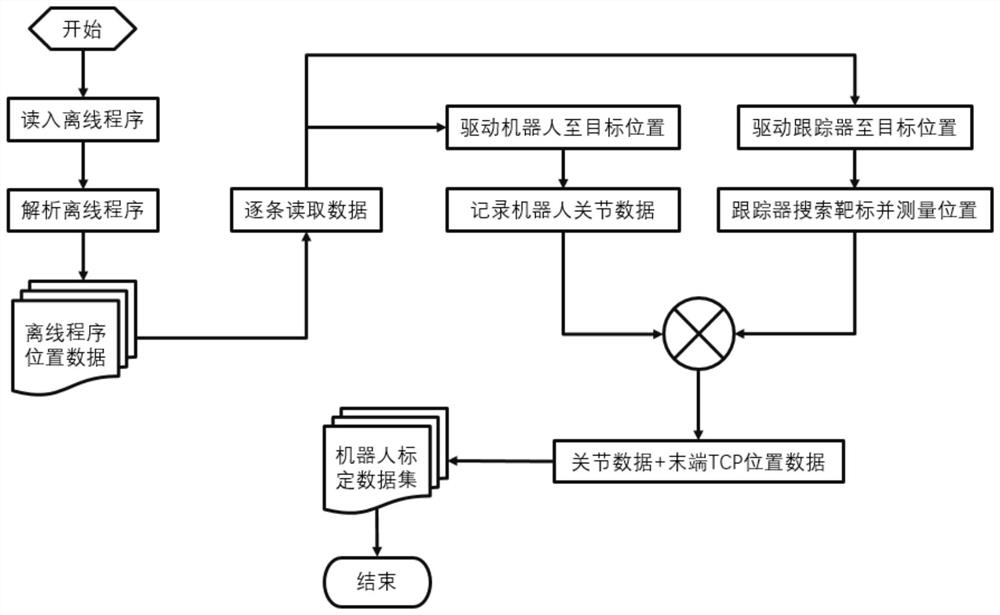
[0031] Embodiments of the present invention provide a method for collecting data sets used for robot error calibration. Figure 1-Figure 3 . in, figure 1 It shows the hardware architecture for implementing the technical solutions of the present application. The robot is the target object of the implementation of the application scheme, that is, the automatic collection method of the robot error calibration data set provided in this embodiment, which is mainly used to collect figure 1 Data for the robot shown in . Wherein, the robot may be a robot provided by the prior art, that is, a device that realizes a certain action or completes a certain work...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More