

Vehicle lane changing behavior identification method based on random forest algorithm
A technology of random forest algorithm and recognition method, which is applied in character and pattern recognition, calculation, computer parts, etc., can solve problems such as difficulty in performing functions, large amount of calculation for trajectory prediction, high accuracy of vehicle motion state information, etc., and achieve processing speed Faster, safer, and more accurate predictions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
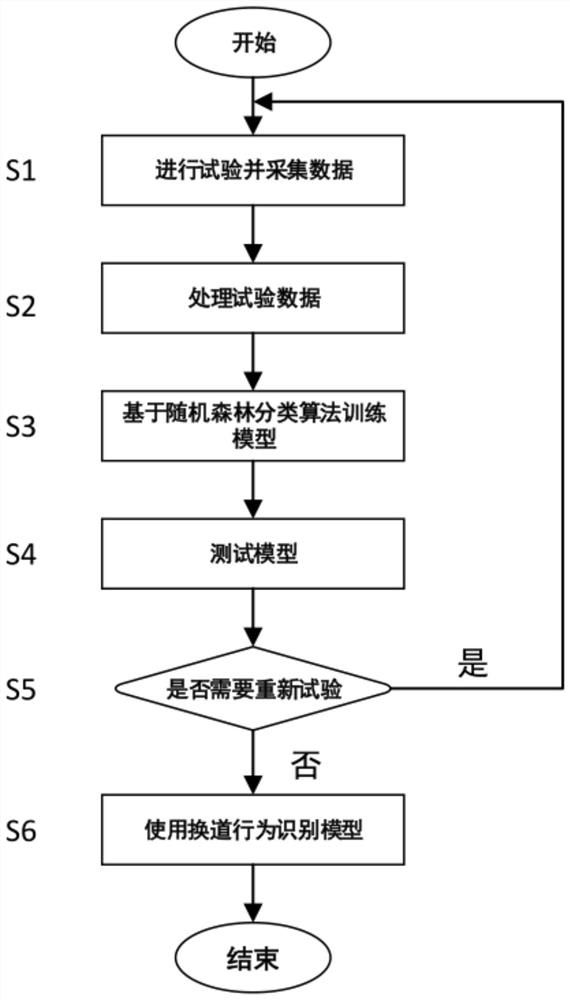
[0034] Please combine figure 1 , which represents a flow chart of the steps of the vehicle lane change recognition method based on the random forest algorithm according to the present invention. Specifically, it includes modeling steps S1-S5 and a recognition step S6 of predicting using a lane-changing behavior recognition model. Each step of a method for identifying a lane-changing behavior of a vehicle based on a random forest algorithm provided in this embodiment will be described in detail below.
[0035] S1. Conduct experiments and collect data:
[0036] Carry out the driver-in-the-loop real-time simulation test based on the simulated driver and collect the test data, and conduct the simulated driving test by multiple drivers. In this embodiment, in the simulated driving test, a 1:1 three-dimensional model of urban roads and expressways is used, and random traffic conditions are set, such as passers-by crossing the road, emergency braking of vehicles ahead, etc. The nu...
Embodiment 2
[0050] In this embodiment, the number of drivers for the simulated driving test is 80, and each driver performs two simulated driving tests; the first test lasts for each driver for 75 minutes, and the second test lasts for 20 minutes. The remaining steps are the same as in Embodiment 1.
Embodiment 3
[0052] In this embodiment, the number of drivers for the simulated driving test is 100, and each driver performs two simulated driving tests; each driver's first test lasts 90 minutes, and the second test lasts 30 minutes. The remaining steps are the same as in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More