

A robot stiffness design method and terminal based on stiffness model
A technology of stiffness design and stiffness model, applied in manipulators, manufacturing tools, etc., can solve the problems of not considering linear stiffness, only focusing on torsional stiffness, local optimization, etc., to achieve the effect of reducing manufacturing cost, wide adaptability, and reasonable robot design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
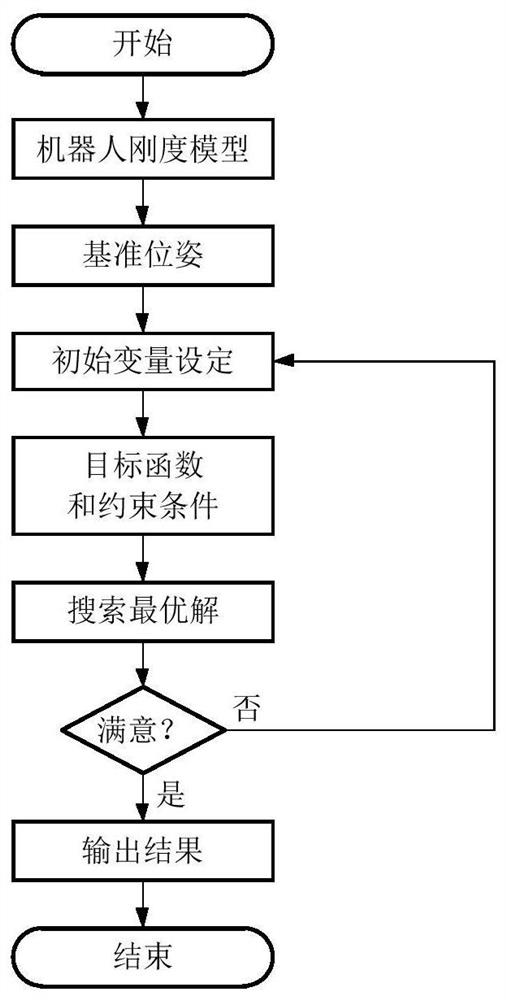
[0080] In one embodiment, combined with figure 1 , provide a kind of robot stiffness design method based on stiffness model, described method comprises the following steps:
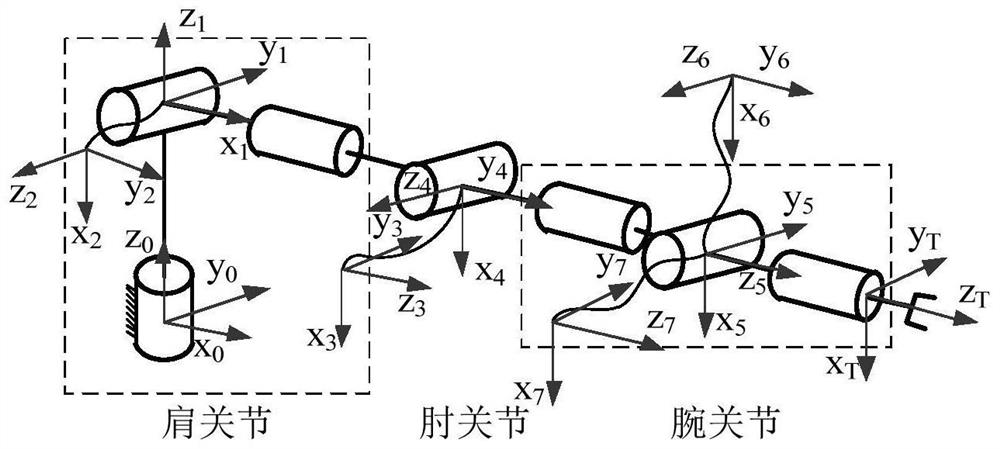
[0081] Step 1, establish the robot stiffness model according to the robot structure and stiffness design parameters;
[0082] Step 2, select the reference pose for robot stiffness design;
[0083] Step 3, constructing a stiffness optimization comprehensive model including the stiffness comprehensive evaluation function, constraint conditions and initial values;
[0084] Step 4, solving the stiffnes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More