An Obstacle Avoidance Method for Fast Moving Surface Vessels
A fast-moving, surface craft technology, applied in non-electric variable control, two-dimensional position/channel control, instruments and other directions, can solve the problem of not being able to give obstacle avoidance time, etc., to achieve small distance, ensure safety, and short time. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
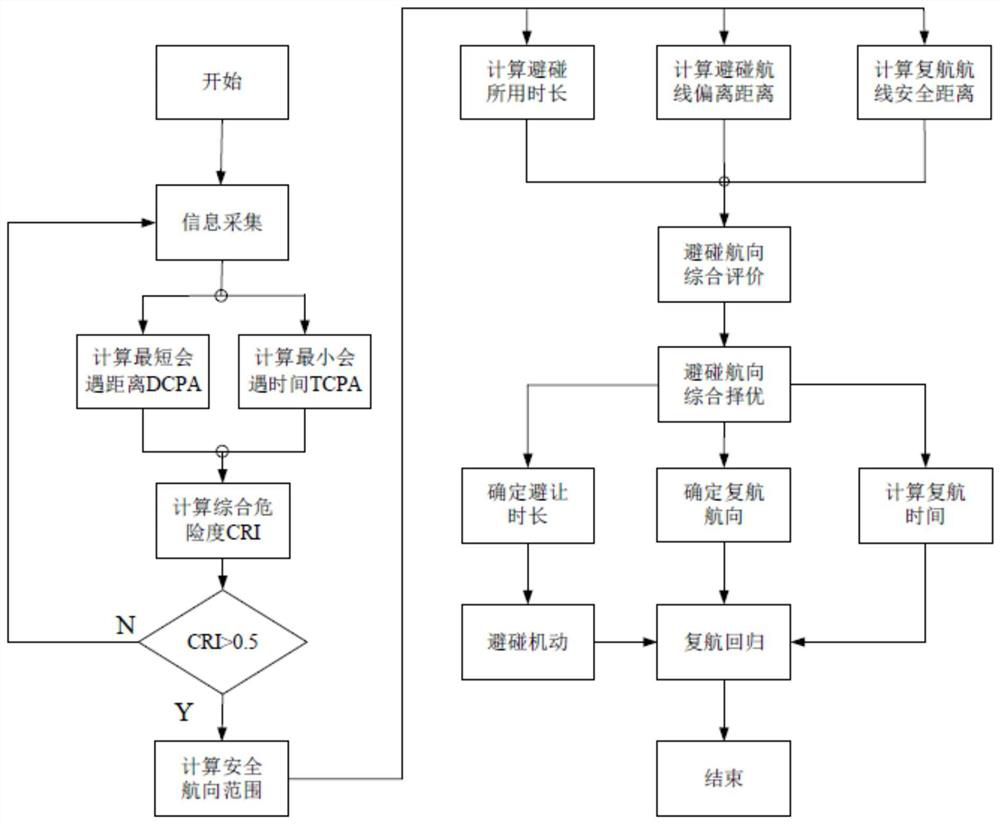
[0026] Specific implementation mode one: a method for avoiding obstacles of a fast-moving surface boat, the specific process is:
[0027] Step 1. Obtain the information of the obstacle boat that is in danger of colliding with the unmanned boat:
[0028] Step 11, installing GPS, AIS and other commonly used navigation equipment on the hull, the driver obtains the course and speed information of the unmanned boat and the course and speed information of the obstacle boat according to the navigation equipment;
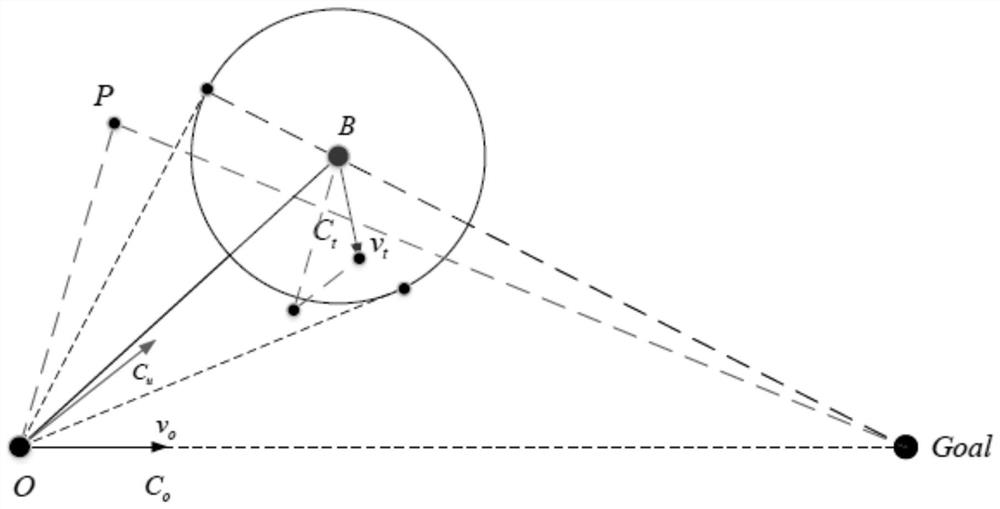
[0029] Step 12, using the geometric obstacle avoidance method to obtain the closest encounter time TCPA and the closest encounter distance DCPA of the unmanned boat and the obstacle boat according to the obtained information;
[0030] Step 13, calculate the collision risk CRI of the unmanned boat and the obstacle boat according to the obtained TCPA and DCPA, when the CRI is greater than 0.5, there is a collision risk;
[0031] Step 14, use the navigation equipment to obtai...
Embodiment 1
[0076] Embodiment 1: Single dynamic obstacle collision avoidance simulation verification:
[0077] Assume that the initial speed of the unmanned boat is V=12kn, the course is 0°, the waypoint is set at the position of the unmanned boat at a distance of 10nmile, and the course of the dynamic obstacle boat is C t =270°, the speed is 13kn, the azimuth is 45°, and the distance is 3nmile.
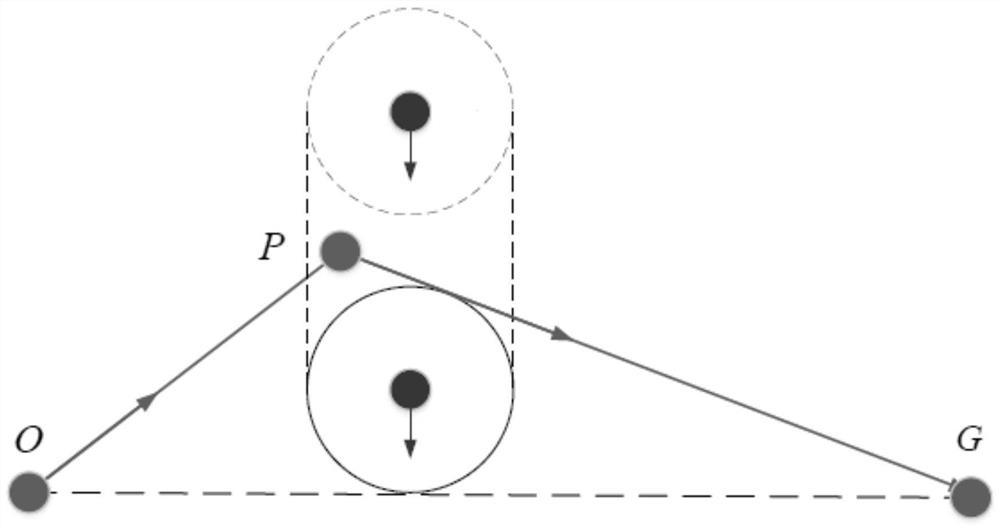
[0078] The initial condition is that the speed of the obstacle boat is greater than that of the unmanned boat, and high-speed obstacle avoidance is adopted. In Figure 4(a), the outer big circle is the safety circle, and the small circle is the range where the obstacle boat is the center of the circle. OP1 and P1M are the scope of the original geometric obstacle avoidance planning, and the arc GF is opposite to the safe heading range of the unmanned boat sailing to P2. Draw the parallel lines P2R1 and P2R2 of CD and CE at P2, and draw the tangents P2A1 and P2A2 of the safety distance circle at ...
Embodiment 2
[0089] Embodiment 2: Multi-dynamic obstacle avoidance:
[0090] Set the unmanned boat to sail in the sea area where there are many dynamic obstacles. The initial heading of the unmanned boat is 0°, the initial speed is 12kn, the speed of the unmanned boat remains unchanged, and the next waypoint of the unmanned boat is at the unmanned The azimuth of the boat is 0° and the distance is 10nmile. According to the information obtained by AIS, there are four obstacle boats near the unmanned boat. If the obstacle boat threatens the navigation of the unmanned boat, the unmanned boat will keep Avoidance sailing is carried out under the condition of constant speed. The relevant parameters of the four obstacle boats are shown in the table below:
[0091] table 3
[0092] obstacle boat distance position course speed T1 3.00 45.00 270.00 13.00 T2 4.00 0.00 45.00 15.00 T3 5.01 356.11 - - T4 7.28 344.05 90.00 4.00
[0093] Navigation s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com