

State variable full-constraint direct yawing moment control algorithm based on pavement adhesion coefficient
A technology of road surface adhesion coefficient and yaw moment, which is applied in the direction of control device, external condition input parameters, transportation and packaging, etc., can solve the problems of vehicle body instability, failure to ensure the safety range of state quantity, and vehicle lateral stability decline. Achieve the effect of improving lateral stability and avoiding working in unstable areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0063] The concept of the present invention and the specific working process will be clearly and completely described below with reference to the accompanying drawings and examples. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, other embodiments obtained by those skilled in the art without creative efforts all belong to the present invention protected range.
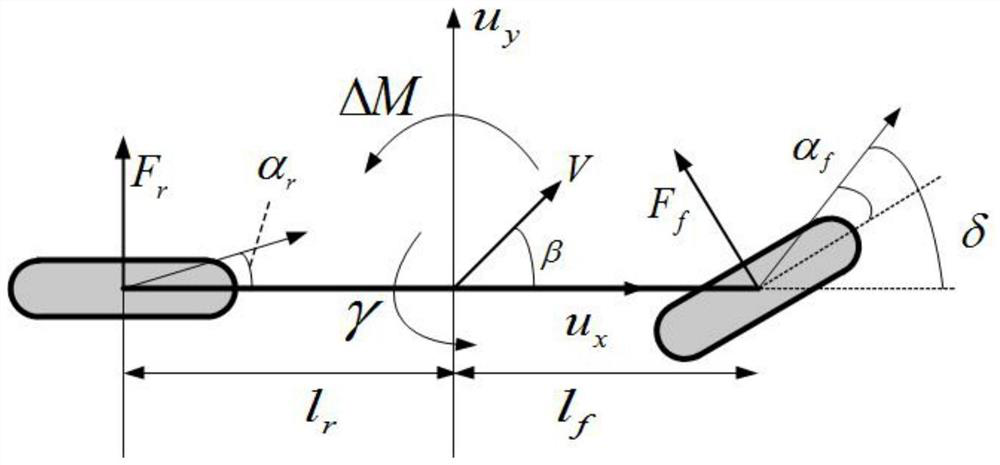
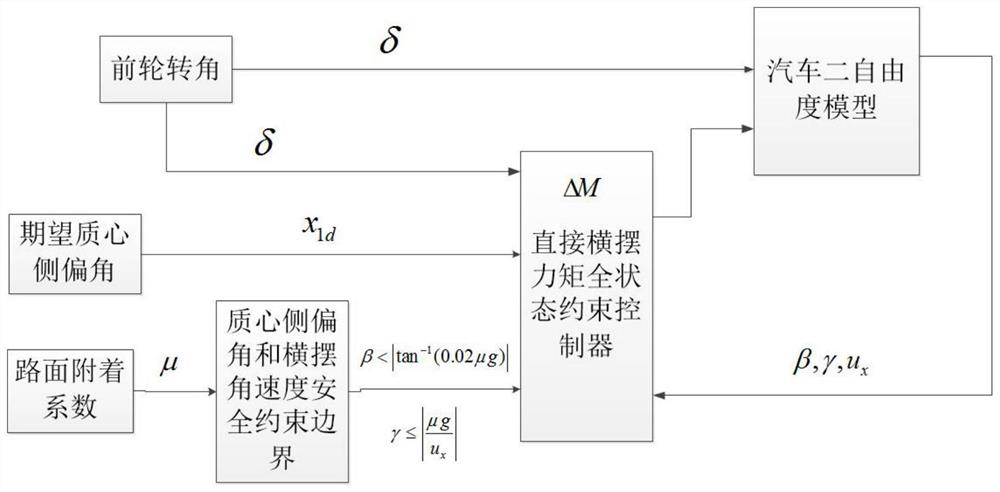
[0064] See figure 2 , a state variable fully constrained direct yaw moment control algorithm based on the road surface adhesion coefficient is composed of a vehicle two-degree-of-freedom dynamics model (such as figure 1 ) modeling and direct yaw moment full-state constraint controller, Table 1 shows the values of vehicle parameters and road parameters.
[0065] Firstly, the dynamic model is established according to the two-degree-of-freedom model of the vehicle; secondly, the side slip angle and yaw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More