High-precision autonomous inspection image recognition method for unmanned aerial vehicle on power transmission line
A power transmission line and image recognition technology, applied in scene recognition, character and pattern recognition, computer components, etc., can solve problems such as complex recognition algorithms, large background interference, and low image clarity, and achieve optimal flight speed and height, Effects of improving clarity and reducing image buffering time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
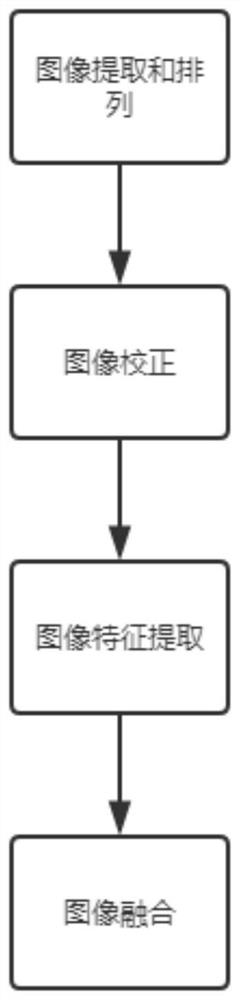
[0030] A high-precision autonomous inspection image recognition method for UAVs on transmission lines, including the following steps:
[0031] S1. Export the photos taken by the UAV, and expand the video files for full-coverage route planning, set 20-30 frames of video images on the flight belt of the UAV as one image unit, and extract one frame of image ;
[0032] S2. Calculate the correlation degree and translation amount of each frame image for the image extracted in S1, and arrange the extracted images according to the correlation degree and translation amount;
[0033] S3. Perform image geometric correction on the image arranged in S2, perform coordinate conversion on the image, and then directly perform grayscale resampling. The minimum pixel points of the image grid in the X and Y directions are 50, and the pixel point data is passed The management node sends it to each other pixel point. After the operation is completed, the operation result of each pixel point is sen...
Embodiment 2
[0046] For the expansion of the video files shot for full-coverage route planning, set 25 frames of video images on the flight belt of the drone as an image unit, extract one frame of image, and the image size is 340*380, so that the appearance of a single frame image is more obvious Image elimination of virtual blur, offset and scale change, and calculate the correlation and translation of each frame of images through the ground monitoring system to restore the real image order;
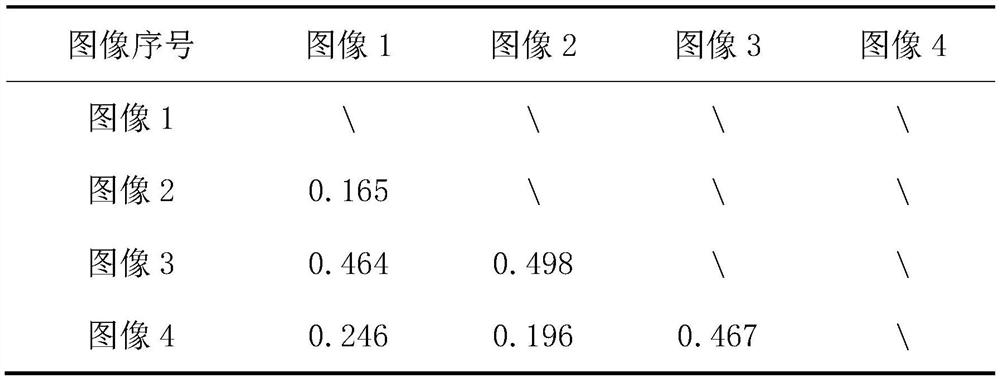
[0047] Table 1 Statistical Table of Image Correlation
[0048]
[0049] In Table 1 above, the maximum value of correlation is 0.498 in image 3 and image 2, and the minimum value is in image 2 and image 1. It can be determined that the head image of the sequence is 2 and the tail image is 3.
[0050] Table 2 Horizontal Offset Statistical Table
[0051]
[0052]
[0053] From Table 2 above, it can be concluded that the real shooting sequence is image 2, image 1, image 4 and image 3.
[0054] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com