

Finger rehabilitation exoskeleton robot with adduction, abduction, flexion and stretching functions
An exoskeleton robot and finger technology, applied in passive exercise equipment, physical therapy, etc., can solve problems such as the inability to achieve adaptive alignment of human-machine joints, and achieve the effect of adaptive alignment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principle of the present invention, and are not intended to limit the protection scope of the present invention.
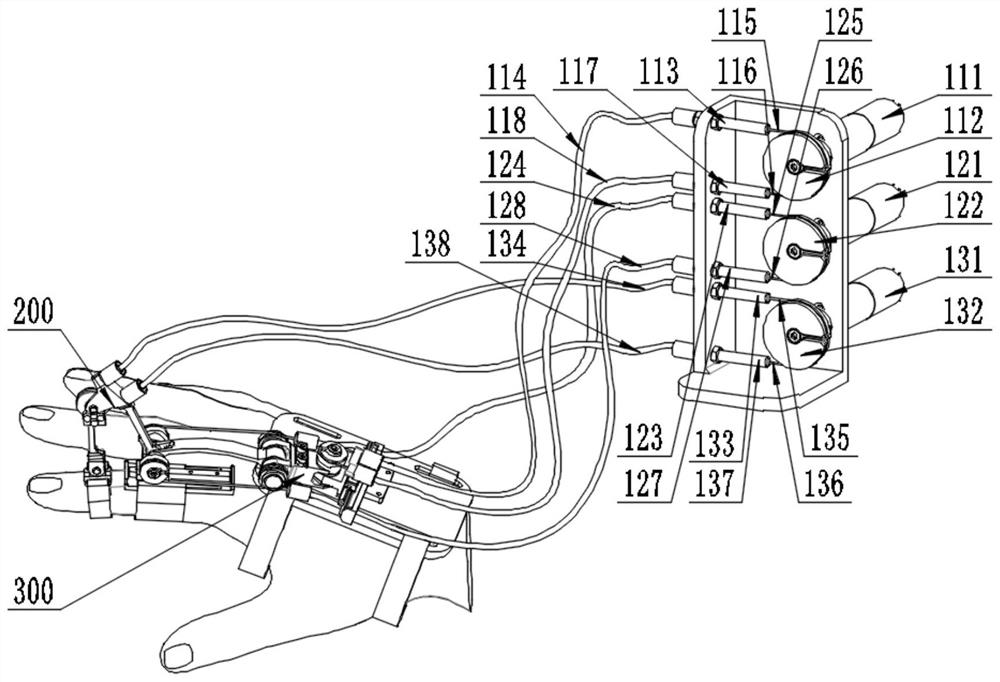
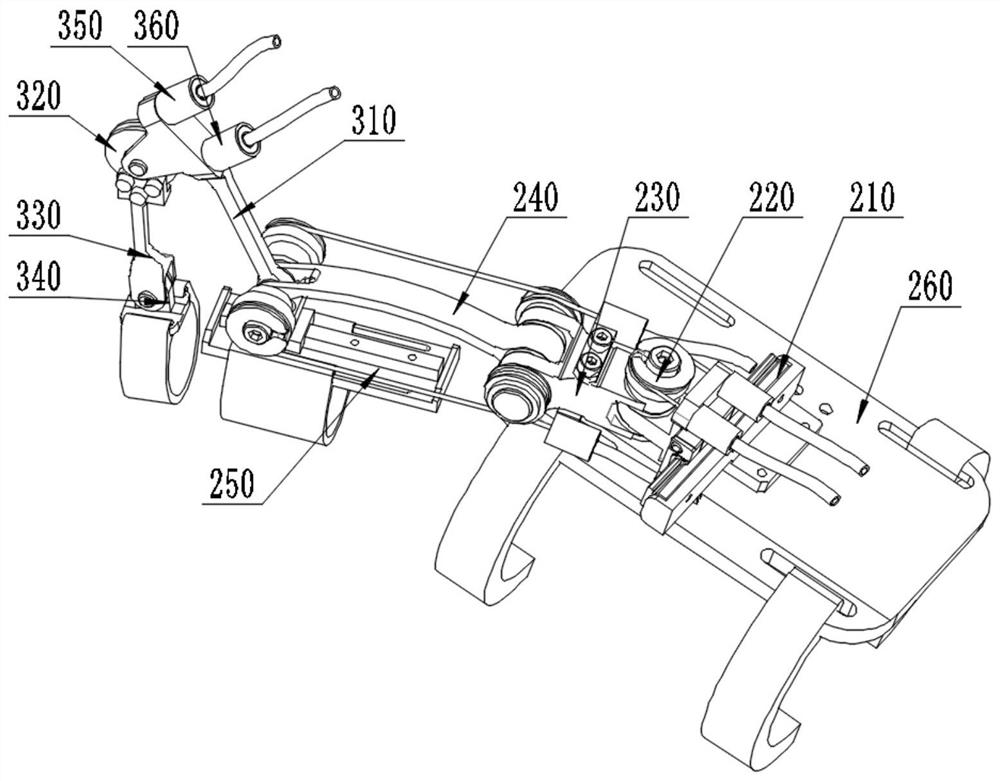
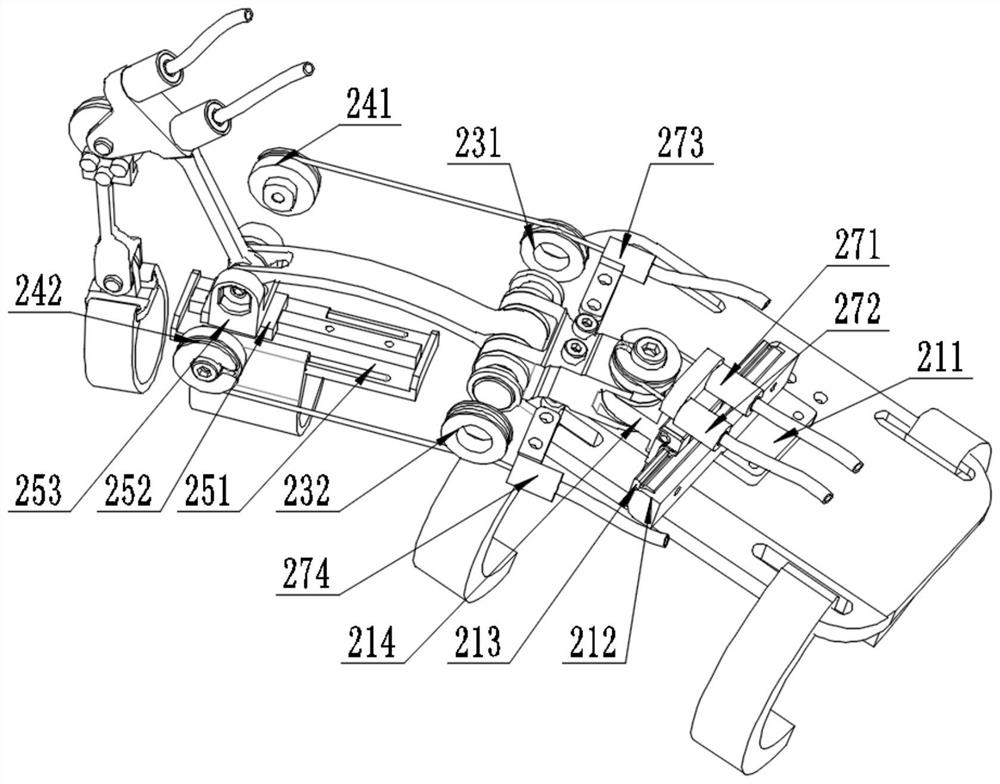
[0051] The invention provides a finger rehabilitation exoskeleton robot with adduction, abduction, flexion and extension, including a drive assembly, a metacarpophalangeal joint transmission assembly, and a proximal joint transmission assembly; the drive assembly includes a first drive assembly carried by a motor support seat , the second drive assembly and the third drive assembly, the first drive assembly, the second drive assembly and the third drive assembly are set independently; the metacarpophalangeal joint transmission assembly includes a palm fixed base, a first translation assembly arranged on the palm fixed base , internal and externa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More