

Local three-degree-of-freedom rigid-flexible coupling bionic robot waist joint
A bionic robot and degree-of-freedom technology, applied in the field of humanoid robots, can solve the problems of high cumulative error, increase the flexibility of the mechanism, and work space, structure and performance gap, and achieve good application prospects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
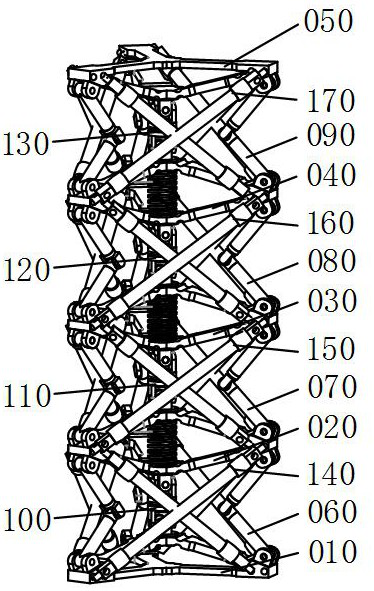
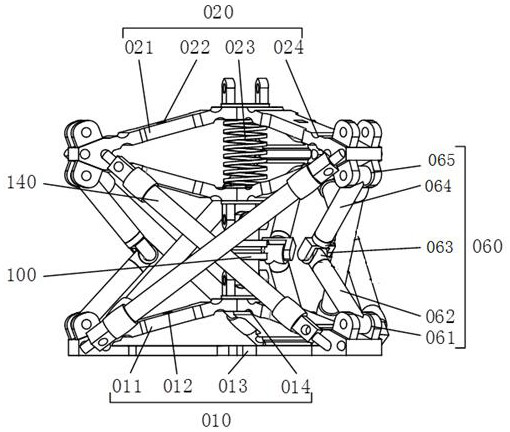
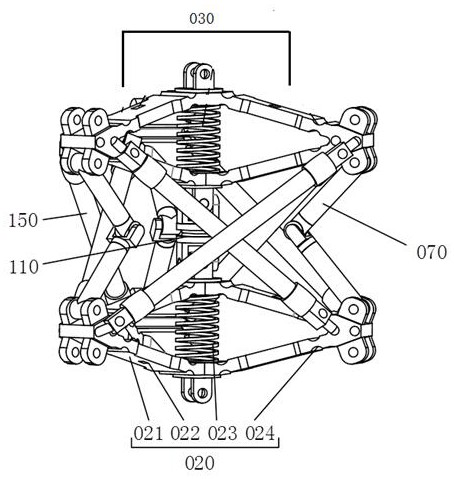
[0019] A local three-degree-of-freedom rigid-flexible coupling bionic robot waist joint, the robot waist joint includes four parallel mechanism units, the four parallel mechanism units are respectively the first parallel unit, the second parallel unit, the third parallel unit, The fourth parallel unit; the bottom of the first parallel mechanism unit is provided with a flexible fixed platform 010 as a fixed support for the waist joint, the first parallel mechanism unit and the second parallel mechanism unit are connected by a flexible shared platform a, the upper end of the second parallel mechanism unit and The lower ends of the third parallel mechanism unit are connected by a flexible shared platform b, the upper end of the third parallel mechanism unit and the lower end of the fourth parallel mechanism unit are connected by a flexible shared platform c, and the upper end of the fourth parallel mechanism unit is provided with a flexible moving platform 050.
[0020] Among them...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More