

A pneumatic-based continuously variable stiffness spinal joint
A spine and joint technology, applied in the field of continuously variable stiffness spine joints, can solve the problems of low rigidity of spine joints and poor bearing capacity, and achieve the effect of large stiffness, bearing capacity, and strong external force resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
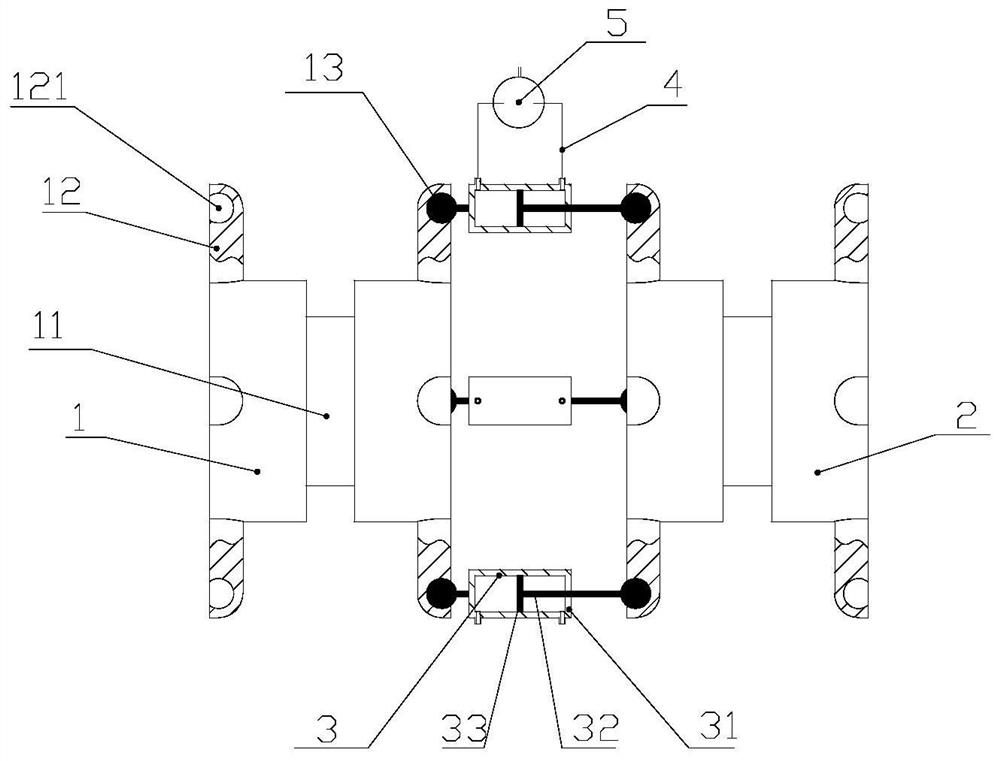
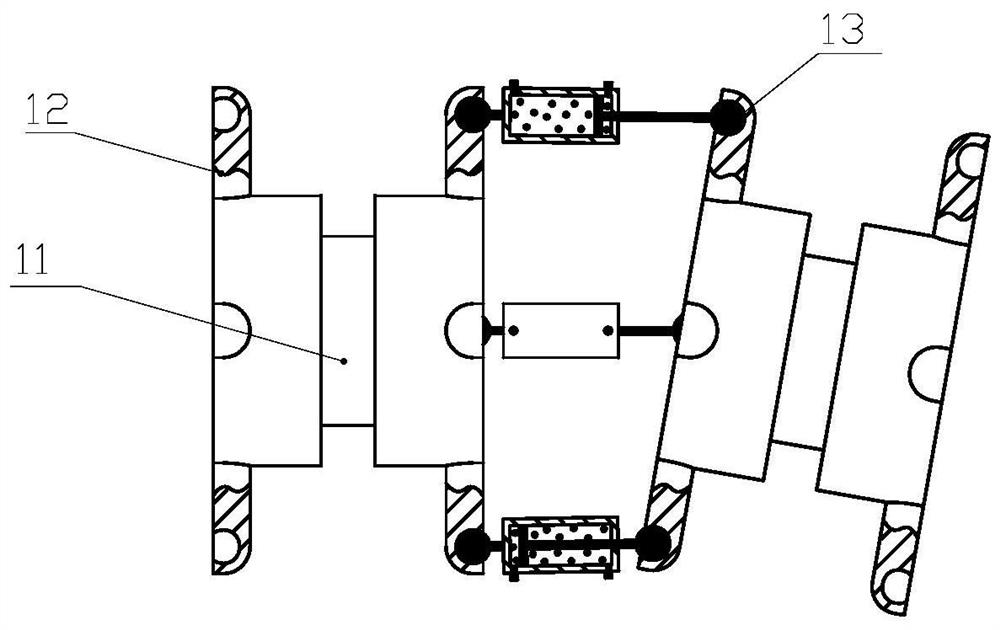
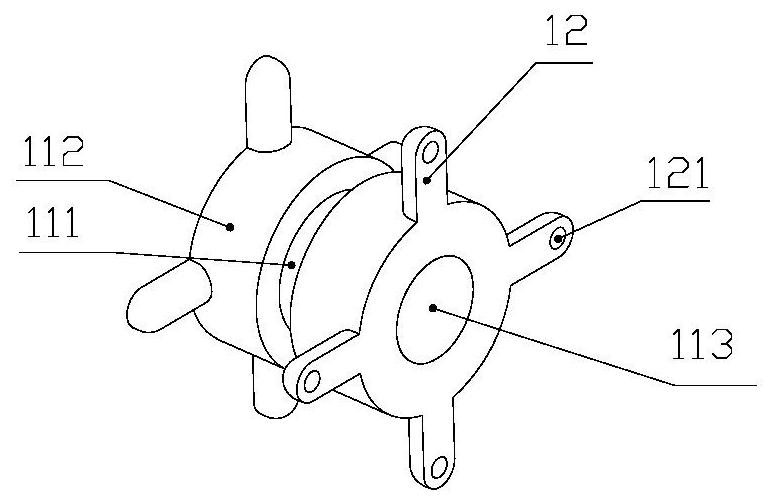
[0022] Embodiment 1: Combining Figures 1 to 3 Describe this embodiment, a pneumatic-based continuous variable stiffness spine joint, which includes a first spine 1 and a second spine 2 with the same structure, wherein the first spine 1 and the second spine 2 are connected end-to-end through several cylinders 3 , a plurality of the cylinders 3 are arranged parallel to each other, and one end of the cylinder body 31 of each cylinder 3 is hinged with the end of the first spine 1, and one end of the piston rod 32 of each cylinder 3 is hinged with the end of the second spine 2 , the chambers located on both sides of the piston 33 in the cylinder 3 are respectively connected to the external air source 5 through the air pipe 4 .
[0023] The first spine 1 and the second spine 2 constitute the main part of the joint, the external air source 5 and the air pipe 4 constitute the power transmission part of the joint, and the cylinder 31, piston 33 and piston rod 32 in the cylinder 3 cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More