

Fruit recognition method and device based on improved SOLO network and fruit picking robot
A technology of fruit recognition and basic network, applied in the direction of picking machine, neural learning method, character and pattern recognition, etc. Strong ability to identify fast and stable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0067] Embodiment 1 of the present invention provides a kind of fruit recognition method based on improved SOLO network, and this method comprises the following steps:
[0068] Obtain photos of fruit trees in an orchard environment;
[0069] Fruit tree photo is input in the identification model based on improved SOLO network, determines whether there is fruit in the described fruit tree photo;
[0070] Wherein, the recognition model based on the improved SOLO network is obtained by using multiple sets of data through machine learning training; each set of data in the multiple sets of data includes: a photo with fruit and label information identifying that the photo has fruit.
[0071] In this embodiment 1, the training based on the recognition model of the improved SOLO network includes:
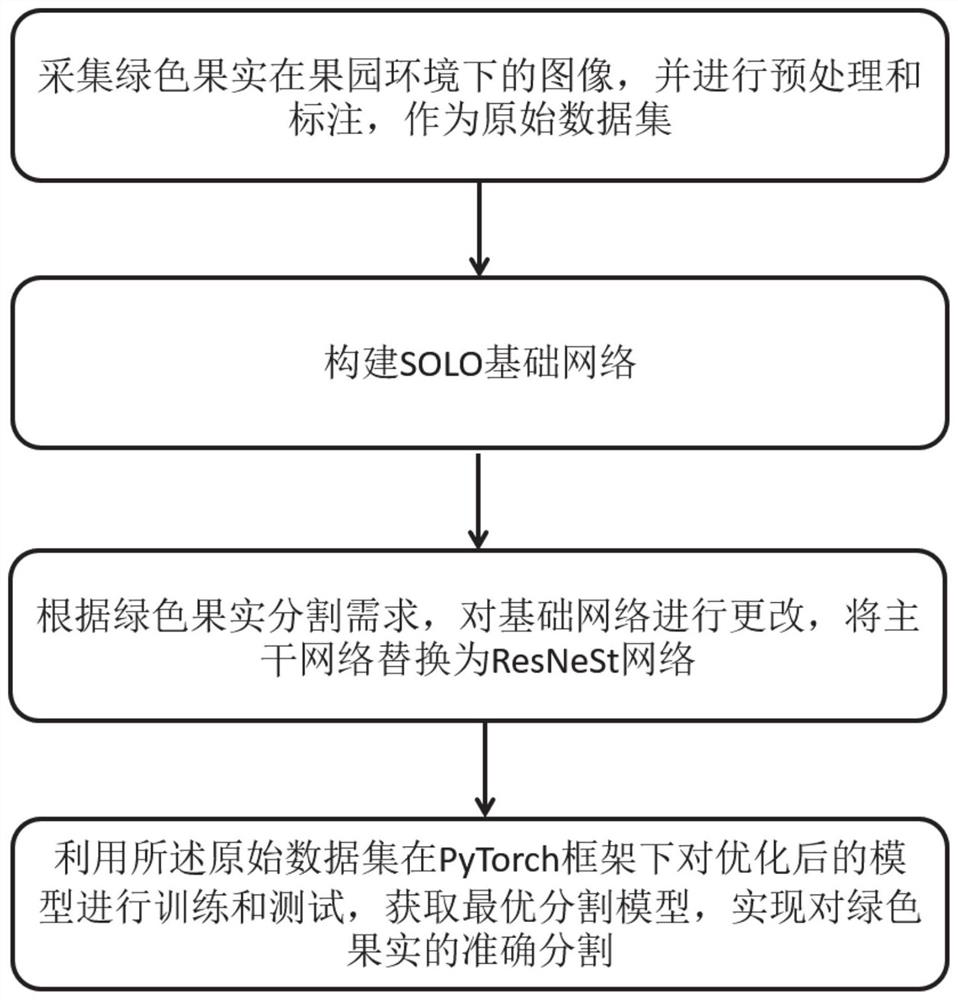
[0072] Collect images of fruits in the orchard environment, and preprocess and label the images of fruits as the original data set;
[0073] Construct SOLO basic network;
[0074] Accordi...
Embodiment 2
[0098] Embodiment 2 of the present invention provides a fruit recognition device based on the improved SOLO network, the device includes: an image acquisition module, used to obtain photos of fruit trees in the orchard environment;
[0099] Recognition module, for inputting the photo of fruit tree into the recognition model based on the improved SOLO network, to determine whether there is fruit in the photo of the fruit tree; Wherein, the recognition model based on the improved SOLO network is trained by machine learning using multiple sets of data Each set of data in the multiple sets of data includes: a photo with fruit and label information identifying that the photo has fruit.
[0100] In this embodiment 2, the identification module includes:
[0101] The optimization unit is used to optimize the constructed SOLO basic network according to the identification requirements of the fruit, and replace the backbone network with the ResNeSt network to obtain an improved SOLO netw...
Embodiment 3
[0128] Embodiment 3 of the present invention provides a fruit recognition method based on the improved SOLO network, the specific process is as follows figure 1 shown.
[0129] Such as figure 1 As shown, the specific process of the fruit recognition method based on the improved SOLO network includes:
[0130] 1. Fruit image acquisition and data set production:
[0131] 1) if figure 2 As shown, the selected green fruits are green apples and immature persimmons (green). The Canon EOS 80D SLR camera is used to collect images of green fruits under different light conditions, different time periods, different weather, and different angles. The image resolution is 6000×4000 , the output format is JPG, 24-bit color image.
[0132] 2) Preprocess the collected images, reduce the image resolution to 600×400, label with LabelMe software, and construct a data set. Such as image 3 shown.
[0133] 3) The original data set is divided into training set, verification set and test set....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More