

Method for assisting robot in walking
A technology of robots and walking robots, which is applied in the directions of appliances, instruments, and radio wave reflection/reradiation to help people walk, and can solve problems such as unpredictable terrain types, and achieve the effect of ensuring smoothness of walking and balance of walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
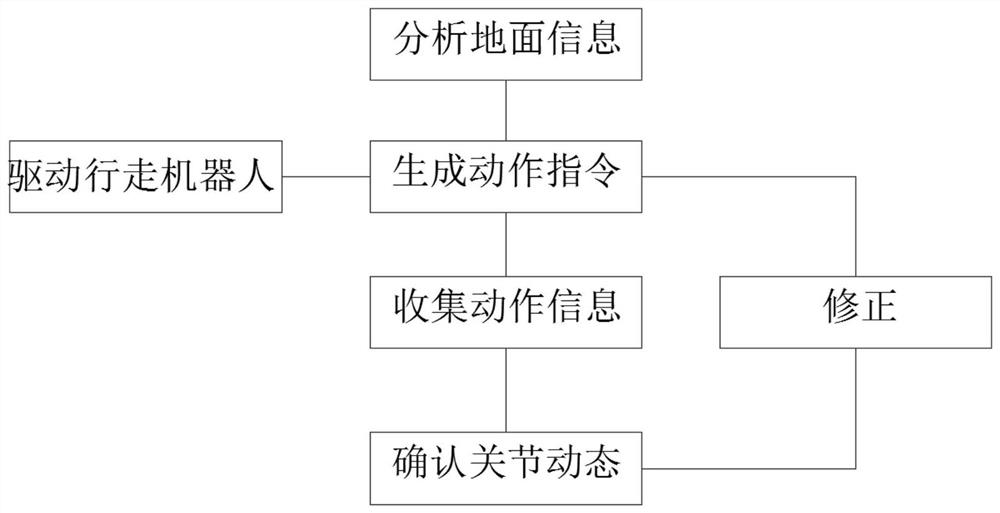
[0044] The present invention also has the following implementation manner, the method further includes: determining the motion state: determining whether the motion state of the at least one joint is changed based on the corrected motion instruction. The at least one joint includes at least one of a hip joint, a knee joint, and an ankle joint.
[0045] The walking assistance robot has a sensing unit that can sense the motion of at least one joint. In order to control each joint (such as the left hip joint, the right hip joint, the left knee joint, and the right knee joint), the motion of each joint may be determined individually, and an individual control signal may be generated based on the determined result. Therefore, the motions of the left and right hip joints and the left and right knee joints are continuously determined in all walking phases, and motion information is calculated based on the determined motions.
[0046] In some embodiments, the method further includes a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More