Unmanned aerial vehicle control method and device
A control method and technology of unmanned aerial vehicle, applied in non-electric variable control, control/regulation system, 3D position/channel control and other directions, which can solve the problems of monotonous picture and users unable to capture the scenery video along the way, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
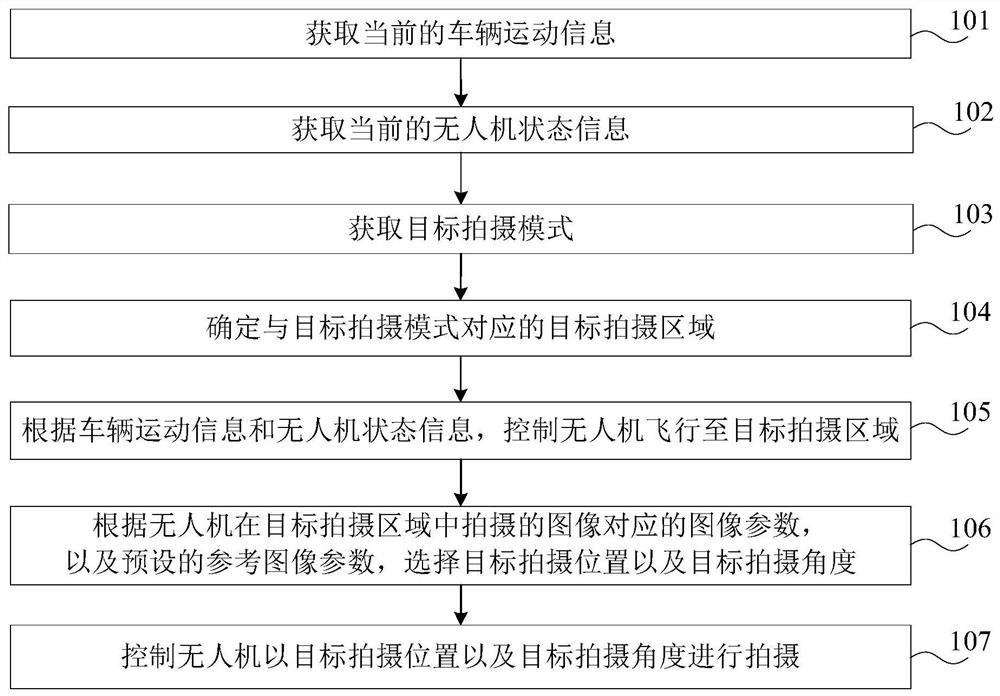
[0080] figure 1 It is a flow chart of a control method for a drone provided in Embodiment 1 of the present invention, such as figure 1 As shown, the method includes:
[0081] Step 101, acquiring current vehicle movement information.
[0082] In the embodiment of the present invention, the vehicle can obtain current vehicle motion information in real time, and the vehicle motion information can include: the driving speed of the vehicle, the steering wheel angle of the vehicle, the navigation information of the vehicle, and the Global Positioning System (GPS, GPS) of the vehicle. ) at least one of the information.
[0083] Step 102, acquiring current UAV status information.
[0084] In the embodiment of the present invention, the UAV can communicate with the vehicle, and the vehicle can obtain the current UAV status information in real time. The UAV status information can include: UAV position information and flight status information. Wherein, the position information of th...
Embodiment 2
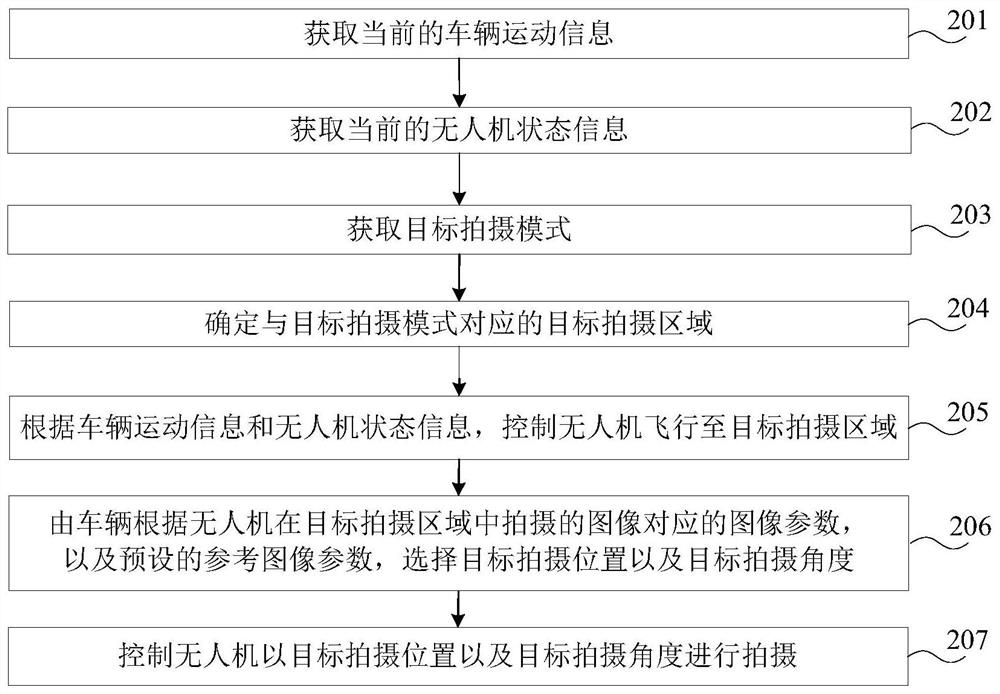
[0102] figure 2 It is a flowchart of a control method for a drone provided in Embodiment 2 of the present invention. The target shooting area includes the first relative area position information between the drone and the vehicle; the status information of the drone includes: the position of the drone information and flight status information; such as figure 2 As shown, the method includes:
[0103] Step 201, acquiring current vehicle motion information.
[0104] In the embodiment of the present invention, this step is similar to the implementation process of step 101 above, and will not be described in detail here.
[0105] Step 202, acquiring current UAV status information.
[0106] In the embodiment of the present invention, this step is similar to the implementation process of step 102 above, and will not be described in detail here.
[0107] Step 203, acquire the target shooting mode.
[0108] In the embodiment of the present invention, the driver or passenger can ...
Embodiment 3
[0145] Figure 4 It is a flowchart of a control method for a drone provided in Embodiment 3 of the present invention. The target shooting area includes the first relative area position information between the drone and the vehicle; the status information of the drone includes: the position of the drone information and flight status information; such as Figure 4 As shown, the method includes:
[0146] Step 301, acquiring current vehicle movement information.
[0147] In the embodiment of the present invention, this step is similar to the implementation process of step 101 above, and will not be described in detail here.
[0148] Step 302, acquiring the current status information of the UAV.
[0149] In the embodiment of the present invention, this step is similar to the implementation process of step 102 above, and will not be described in detail here.
[0150] Step 303, acquire the target shooting mode.
[0151] In the embodiment of the present invention, this step is si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com